
Бесплатный фрагмент - Думай иначе
Креативное мышление. Издание 3-е измененное и дополненное

Данная книга — это 3-е, значительно расширенное и дополненное издание вышедшей раньше книги. Некоторые устаревшие примеры заменены современными на 2024 год.
Вам доводилось испытывать восхищение изобретениями из окружающего нас мира?
Вы задумывались над вопросом — ну как?! Как они сумели это придумать? Ну, например:
— Как получают целенькое ядро грецкого ореха для конфет?
— Как Форд снизил простои конвейера, всего лишь изменив оплату труда ремонтников?
— Как великий архитектор Гауди придумал необычные формы зданий в Барселоне, которые поражают весь мир?
Тогда — эта книга для вас! Вы увидите, что даже самые остроумные решения величайших изобретателей мира– от Леонардо да Винчи до Стива Джобса — основаны на простых и понятных приемах. В книге представлены самые мощные из них:
АНАЛОГИЯ — сделаем так же, как и…!
ИНВЕРСИЯ — давайте сделаем не так, как все, а наоборот?
ЭМПАТИЯ — давайте представим, что мы… и посмотрим на мир его глазами?
ФАНТАЗИЯ — давайте придумаем невозможное, мы — волшебники! Как мы тогда решили бы задачу? Как улучшили то, что доставляет неудобства?
Хорошо, скажете вы, а как? Как работают эти приемы?
Ответы на этот вопросы вы найдете в этой книге — своего рода хрестоматии применения перечисленных изобретательских приемов в самых разных областях человеческой деятельности.
Данная книга описывает наиболее общие способы решения изобретательских задач и получения новых идей.
Материал легко и быстро усваивается, показывает, что изобретать можно по определенным правилам, методам. Кроме того, материал книги создает у читателей мотивацию в изучении следующего материала.
В книге приводится около 400 примеров и задач и около 240 иллюстраций — богатый материал из личной картотеки одного из самых результативных современных изобретателей и известного исследователя изобретательского мышления — Владимира Петрова.
Надеемся, книга распахнет перед вами захватывающий мир креативных решений, и приоткроет завесу тайны изобретательского творчества. Уверены, после прочтения книги, вы станете подмечать изобретательские приемы в окружающих технических объектах. А возможно, начнете изобретать сами?
Книга рассчитана на широкий круг читателей и будет особенно полезна тем, кто хочет быстро получать новые идеи, предназначена для студентов всех специальностей, учащихся школ, посетителей элективных курсов и творческих мастерских.
Особенно полезна книга для тех, кто начал всерьез изучать ТРИЗ — теорию решения изобретательских задач Г. С. Альтшуллера.
Приятного чтения!
Благодарности
Я премного благодарен моим друзьям и коллегам в оформлении этой книги: Андрею Ефимову (Россия), Галине Энглин (Германия), Натигу Алиеву (Азербайджан), Михаил Онищенко (Канада), Tanasak Pheunghua (Таиланд), Daniel Robert (Великобритания), Yudai Katami (Япония), Shoji Takeuchi (Япония), Roberto Paiella (США).
Введение
Знание некоторых принципов легко возмещает незнание некоторых фактов.
Клод Адриан Гельвеций
Цель данной книги показать, что выдвигать новые идеи (изобретать) можно по определенным правилам, используя разнообразные инструменты.
Эту тему автор обычно дает в обзорной или вступительной лекции для привлечения интереса слушателей. Материал легко и быстро усваивается слушателями и создает у них впечатление легкости изучения темы и мотивацию в изучении следующего материала. Кроме того, слушатель получает первые инструменты, которые после первой лекции может использовать на практике. Таким образом, этот материал может служить вступлением к изучению ТРИЗ.
Наиболее общие и распространенные следующие простейшие приемы изобретательства:
— аналогия;
— инверсия;
— эмпатия;
— фантазия.
Основы излагаемого материала взяты из [11] и работ автора [10, 12]. В данной книге существенно расширены понятия аналогии и инверсии, в основном за счет структуризации, более глубокого рассмотрения переноса технологий, введения понятия ведущей области техники и использования новых примеров.
Книга рассчитана на широкий круг читателей и будет особенно полезна тем, кто хочет быстро получать новые идеи.
Глава 1. Аналогия
1.1. Определение аналогии
Анало́гия (др.-греч. ἀναλογία «пропорция, соответствие, соразмерность») — подобие, равенство отношений; сходство предметов, явлений, процессов, величин и т. п. в каких-либо свойствах, а также познание путем сравнения.
При решении задач идею решения можно получить путем применения известного аналогичного решения, «подсказанного» технической или художественной литературой, увиденного в кино или «подсмотренного» в природе.
1.2. Аналогия с природой
Выявлением и использованием «механизмов природы» занимается наука бионика.
Био́ника (от др.-греч. Βίον — живущее) — прикладная наука о применении в технических устройствах и системах принципов организации, свойств, функций и структур живой природы, то есть формы живого в природе и их промышленные аналоги. Проще говоря, бионика — это соединение биологии и техники. Бионика рассматривает биологию и технику совсем с новой стороны, объясняя, какие общие черты и какие различия существуют в природе и в технике.
Бионика исследует объекты живого и растительного мира, выявляет принципы их действия и конструктивные особенности, с целью применения этих знаний в науке и технике. Концепция бионики не нова. Еще 3000 лет назад китайцы пытались перенять у насекомых способ изготовления шелка.
Первый существенный вклад в эту науку внес великий ученый и художник Леонардо да Винчи.
Вот некоторые из его работ:
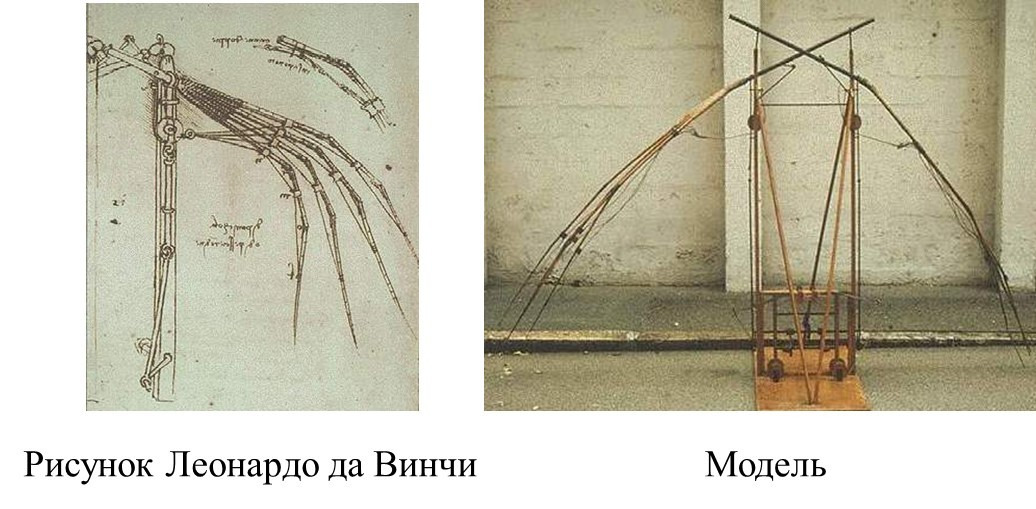
Пример 1.1. Механизм бьющихся крыльев
Леонардо писал: «Если скажешь, что сухожилия и мускулы птицы несравненно большей силы, чем сухожилия и мускулы человека, принимая во внимание, что все мясо стольких мускулов и мякоть груди созданы ради пользы и увеличения движения крыльев, с цельной костью в груди, сообщающей величайшую силу птице, с крыльями, целиком сотканными из толстых сухожилий и других крепчайших связок хрящей и крепчайшей кожи с разными мускулами, то ответ на это гласит, что такая крепость предназначена к тому, чтобы иметь возможность сверх обычной поддержки крыльев удваивать и утраивать движение по произволу, дабы убегать от своего преследователя или преследовать свою добычу; ибо в этом случае надобно ей удваивать и утраивать свою силу и, сверх того, нести в своих лапах такой груз по воздуху, каков вес ее самой; как видно это на примере сокола, несущего утку, и орла, несущего зайца, прекрасно показывающем, откуда такой избыток силы берется; но для того чтобы держаться самому, и сохранять равновесие на крыльях своих, и подставлять их течению ветров, и поворачивать руль на своем пути, потребна ему сила небольшая и достаточно малого движения крыльев, и движения тем более медленного, чем птица больше. И у человека тоже запас силы в ногах — больший, чем нужно по его весу; и дабы убедиться, что это так, — поставь человека на ноги на берег и потом замечай, на сколько отпечаток его ног уходит вглубь. Затем поставь ему другого человека на спину, и увидишь, насколько глубже уйдет он. Затем сними человека со спины и заставь подпрыгнуть вверх — насколько можно, найдешь, что отпечаток его ног более углубился при прыжке, нежели с человеком на спине; следовательно, здесь в два приема доказано, что у человека силы вдвое больше, чем требуется для поддержания его самого».
Рисунок Леонардо механизма бьющихся крыльев и его модель (рис. 1.1).

Пример 1.2. Механизм крыла
В книгах Леонардо можно прочитать: «Посмотри на крылья, которые, ударяясь о воздух, поддерживают тяжелого орла в тончайшей воздушной выси, вблизи стихии огня, и посмотри на движущийся над морем воздух, который, ударяя в надутые паруса, заставляет бежать нагруженный тяжелый корабль; на этих достаточно веских и надежных основаниях сможешь ты постигнуть, как человек, преодолевая своими искусственными большими крыльями сопротивление окружающего его воздуха, способен подняться в нем ввысь».
Рисунок Леонардо механизма крыла и его модель (рис. 1.2).
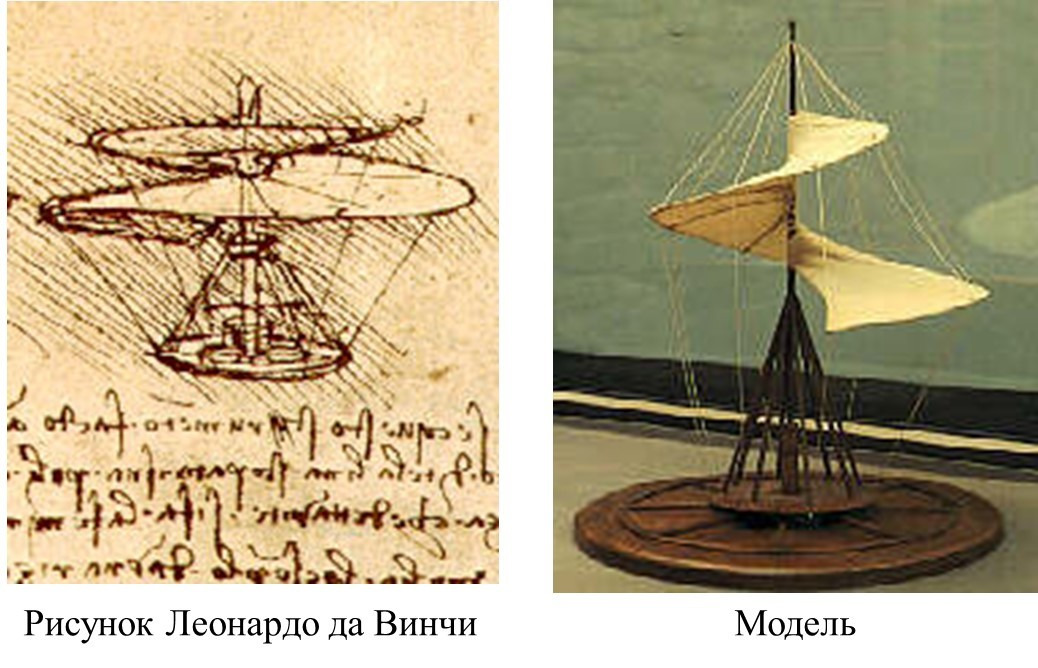
Пример 1.3. Воздушный винт — вертолет
Вот, что говорил Леонардо про устройство винта: «Я полагаю, что, если это устройство винта правильно изготовить, то есть если винт сделать из льняной ткани и поры ткани пропитать крахмалом, а за счет механизма придать быстрое вращательное движение винту, то это устройство поднимется в воздух.
Наружный край винта должен быть из проволоки толщиной с веревку, и от окружности до середины должно быть восемь локтей.
Я говорю, что когда прибор этот, сделанный винтом, сделан хорошо, т.е. из полотна, поры которого прокрахмалены, и быстро приводится во вращение, что названный винт ввинчивается в воздух и поднимается вверх. В качестве примера беру я широкую и тонкую линейку, которая стремительно быстро бросаема в воздух; ты увидишь тогда, что твоя рука движется в направлении пересечения с названной доской.
Сделай, чтобы арматура вышеназванного [полотна] была изготовлена из тонких длинных трубок. Можно сделать себе маленькую модель из бумаги, ось которой — из тонкого листового железа, закручиваемая с силой, и которая, будучи отпущена, приводит во вращение винт».
Рисунок воздушного винта может быть датирован между 1483–1486 гг.
Это — один из самых известных рисунков Леонардо да Винчи. Некоторые эксперты идентифицировали механизм как предок вертолета. К рисунку дано всего лишь одно примечание — диаметр воздушного винта до 5 метров, использовать при изготовлении тростник, льняную ткань и трос. Леонардо предполагал, что механизмом будут управлять четыре человека, которые будут находиться на центральной платформе и за счет ручных рычагов предавать вращательное движение винту. Машина, разработанная Леонардо, вероятно, никогда не оторвалась бы от земли и не смогла бы перемещаться. А вот если бы увеличить движущую силу (вместо человеческой), то машина вполне могла бы подняться в воздух и перемещаться в пространстве. Зная о других разработках Леонардо, также можно утверждать, что, применив дополнительные устройства, полетом можно и управлять. Скорее всего, мысль использовать этот винт его далее не заинтересовала. Применить другую двигательную силу в то время было просто невозможно. Поэтому больше всего разрабатывалось механизмов, имеющих пассивную тягу, — механизмы с крыльями (планеры). А также механизмы с движущимися крыльями после наблюдения за птицами. Леонардо был очень наблюдательный человек, и все свои наблюдения пытался суммировать.
Рисунок Леонардо винта и его модель (рис. 1.3).
Пример 1.4. Планер с хвостом для управления полетом
Леонардо писал в своих исследованиях: «Названная птица должна при помощи ветра подниматься на большую высоту, и в этом будет ее безопасность, потому что даже в случае, если б ее постигли все ранее названные опрокидывания, у нее есть время вернуться в положение равновесия, лишь бы члены ее были большой стойкости, способные упомянутыми выше средствами противостоять стремительности и импульсу спуска — связками из прочной дубленой кожи и веревочными сухожилиями из прочнейшего сырцового шелка. И пусть никто не возится с железным материалом, потому что последний быстро ломается на изгибах или изнашивается, почему и не следует с ним путаться».
Рисунок Леонардо планера и его модель (рис. 1.4).

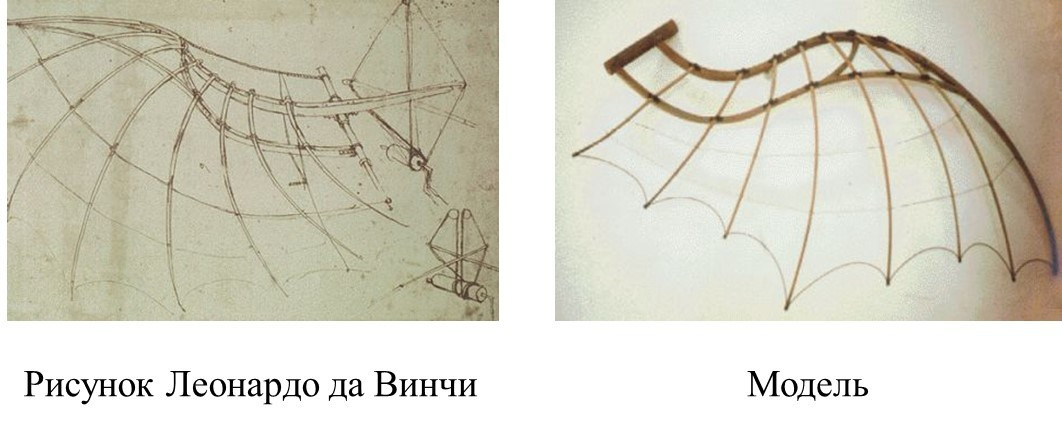
Пример 1.5. Структура крыла
Леонардо писал: «Помни, что птица твоя должна подражать не иному чему, как летучей мыши, на том основании, что ее перепонки образуют арматуру, или, вернее, связь между арматурами, т. е. главную часть крыльев. И если бы ты подражал крыльям пернатых, то [знай, что] у них, из-за того, что они сквозные, — более мощные кости и сухожилия, т. е. перья их друг с другом не соединены и сквозь них проходит воздух. А летучей мыши помогает перепонка, которая соединяет целое и которая не сквозная».
Рисунок Леонардо структуры крыла и его модель (рис. 1.5).
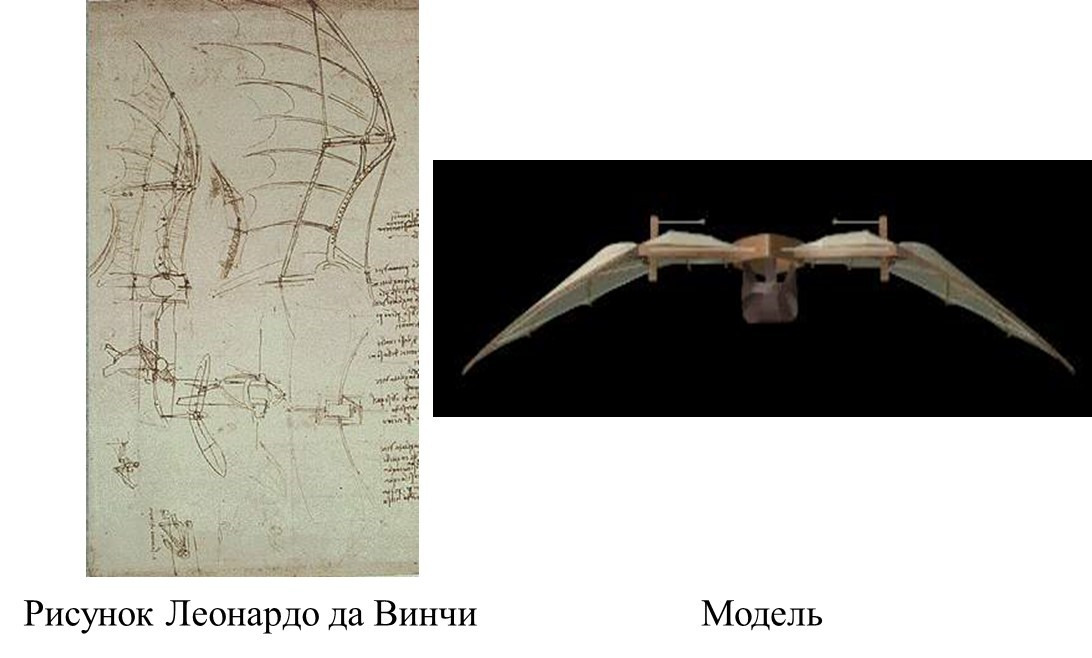
Пример 1.6. Планер с балансировкой тела для маневров
Леонардо писал: «Человек в летательном своем снаряде должен сохранять свободу движений от пояса и выше, дабы иметь возможность балансировать, наподобие того, как он делает это в лодке, — так, чтобы центр тяжести его и машины мог балансировать и перемещаться там, где это нужно, при изменении центра его сопротивления».
Рисунок Леонардо планера и его модель (рис. 1.6).
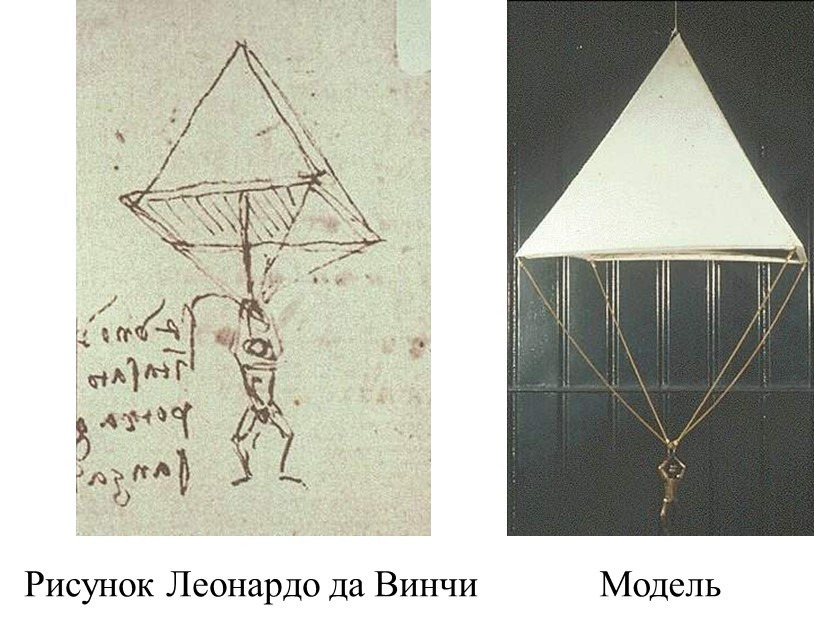
Пример 1.7. Парашют
Процитируем высказывания Леонардо об исследованиях спуска человека с большой высоты: «Когда у человека есть шатер из прокрахмаленного полотна, шириной в 12 локтей и вышиной в 12, он сможет бросаться с любой большой высоты без опасности для себя».
Рисунок Леонардо парашюта и его модель (рис. 1.7).
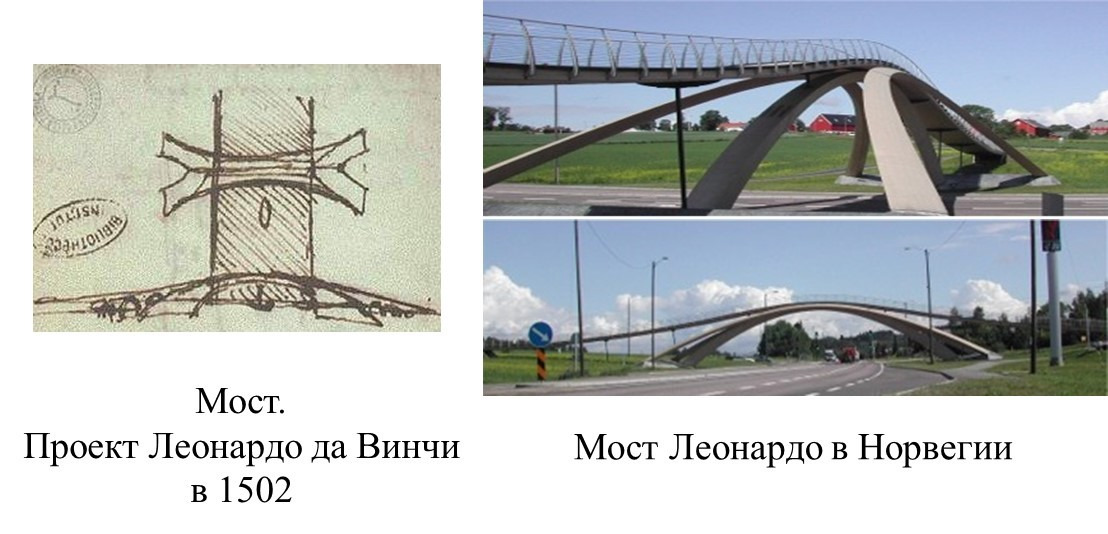
Пример 1.8. Мост Леонардо да Винчи
В норвежском городке Ас 31 ноября 2001 года открыли 100-метровый пешеходный мост, созданный по проекту Леонардо да Винчи. Это первый случай за 500 лет, когда какой-либо архитектурный проект Леонардо получил реальное воплощение.
Этот мост перекинут на высоте 8 м над автострадой Е-18, в 35 км к югу от Осло. При реализации моста пришлось поступиться только одной задумкой Леонардо да Винчи — в качестве строительного материала было использовано дерево, а 500 лет назад мост планировалось построить из камня.
Леонардо да Винчи спроектировал это сооружение в 1502 году для турецкого султана Баязета II. Леонардо предложил перекинуть мост через залив Золотой Рог в Стамбуле. Если бы проект был реализован, этот мост был бы самым длинным мостом своего времени — его длина составляла 346 метров, ширина 23 метра, а пиковая высота — 40 метров выше уровня воды. Суть проекта — настил моста поддерживают три дуги-пролета, упирающиеся в землю. Уникальная особенность — двойная структура поддержки в основании моста, имеющего форму подобно хвосту воробья. Леонардо да Винчи так писал о нем турецкому султану Баязету II: «Мост в виде арки будет настолько высок, что любой корабль на полных парусах беспрепятственно пройдет под его сводами». Однако султан Баязет II отказался от предложений флорентийского художника.
Рисунок Леонардо моста и его воплощение (рис. 1.8).
1.2.1. Области применения биотехнологии
1. Медицина, фармацевтика и медицинская биотехнология
2. Промышленность и производство
2.1. Химическая и нефтехимическая промышленность
2.2. Металлургия и материаловедение
2.3. Автомобильная промышленность
2.4. Авиакосмическая промышленность
2.5. Судостроительная промышленность
2.6. Электронная промышленность
2.7. Робототехника
2.8. Сельское хозяйство и пищевая промышленность
2.9. Деревообрабатывающая промышленность
2.10. Текстильная промышленность
3. Транспорт
4. Энергетика
5. Системы управления, автоматизация, информационные технологии, искусственный интеллект, нейротехнологии, технологии виртуальной и дополненной реальности
6. Экология и охрана окружающей среды
7. Безопасность (сетевая и информационная безопасность, промышленная безопасность, физическая безопасность и защита, экологическая и экологическая безопасность)
8. Исследование и освоение космоса (различные исследовательские миссии на другие планеты и астероиды, межзвездные миссии и т. д.)
9. Технологии в спорте
10. Экосистемы и устойчивое развитие
11. Геотехнологии и геология
12. Экспериментальная музыка и звуковая инженерия
И другие
Давайте приведем несколько примеров применения.
1.2.2. Примеры применения биотехнологии
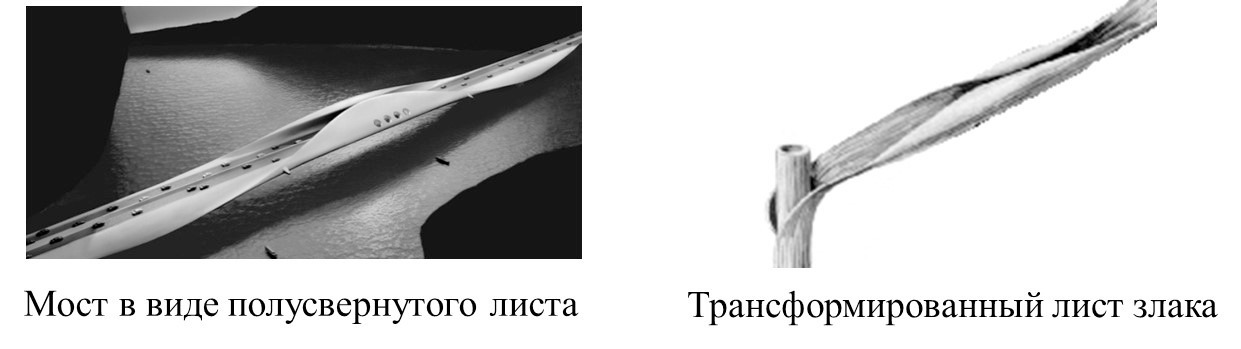
Пример 1.9. Мост в виде полусвернутого листа
Свернутые в трубочку листья растений образуют причудливые желоба, позволяют сделать «конструкцию» листа более прочной без затрат на это дополнительного «строительного» материала. Природа использует и другие формы, например закрученные в спираль или ребристые.
Подражая природным структурным формам, удается спроектировать ажурные сооружения. Взяв за основу форму полусвернутого листа, инженеры спроектировали мост через реку (рис. 1.9), сочетающий в себе поразительную прочность и легкость, экономичность и красоту конструкции.
Пример 1.10. Наутилус
Nautilus pompilius (Кораблик) (класс Cephalopoda, подкласс Nautiloide) — одно из самых древних животных Земли, которые жили еще 100 миллионов лет тому назад.
Эти моллюски обитают на большой глубине — обычно около полукилометра, а иногда и до 700 м. Раковина имеет спиралевидную форму, разделенную перегородками на несколько камер. Тело моллюска помещено в последней камере. Каждая перегородка имеет отверстие. Конструкция раковины обеспечивает ее подъем или опускание. Моллюск заполняет камеры газом или водой. Когда наутилус хочет опуститься на глубину, он наполняет камеры водой, а для того, чтобы подняться, набирает газ, который вытесняет воду. Раковина становится легкой и всплывает.
На этом принципе работает подводная лодка (рис. 1.10).

Рис. 1.10. Наутилус
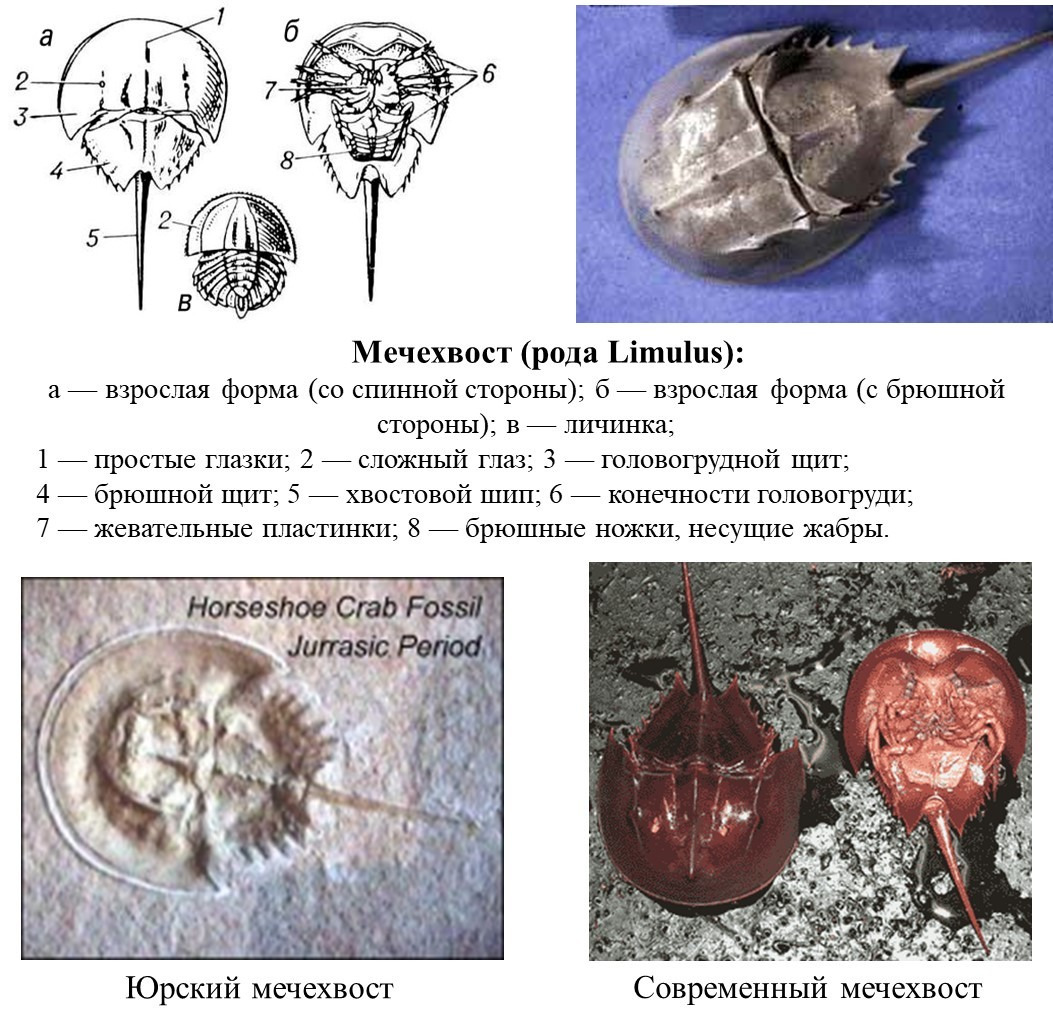
Пример 1.11. Мечехвост
Мечехвосты (Xiphosura), отряд преимущественно вымерших морских членистоногих животных класса меростомовых. Уплощенное тело (длиной до 90 см) состоит из головогруди с 6 парами конечностей, служащих для передвижения, захвата пищи и ее размельчения, и брюшка с хвостовым шипом и 6 парами листовидных конечностей с многочисленными жаберными листочками (рис. 1.11). На спинной стороне головогруди — пара простых глазков, на боках — пара сложных. Современных мечехвостов 3 рода, включающих 5 тропических видов: один — в Атлантическом океане у берегов Центральной и Северной Америки, остальные — у юго-восточных и восточных берегов Азии и прилегающих островов. Современные мечехвосты — «живые ископаемые», существуют, почти не изменившись, около 350 млн лет.
Две пары глаз мечехвостов (простые и сложные) выполняют разные функции. Сложные глаза, состоящие из 1000 простых глазков (омматидиев), обладают способностью усиливать контраст изображения. Основано это уникальное свойство на взаимодействии омматидиев, когда при освещении один омматидий усиливает свет за счет ослабления соседнего, делая сильный свет сильнее, а слабый слабее. Разность между ними становится больше и дает возможность лучше рассмотреть предметы с нечеткими краями на фоне с помехами.
По принципу глаза мечехвоста спроектированы электронные модели и схемы систем, например, для получения снимков небесных светил, аэрофотосъемки со спутников и т. д.
Пример 1.12. Движитель — хвост рыбы
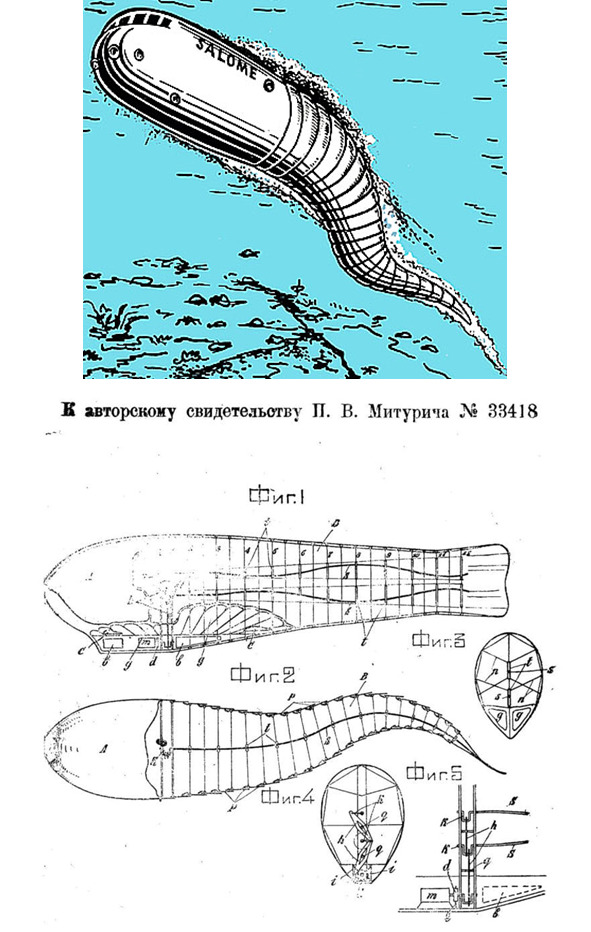
По аналогии с движением хвостового плавника или туловища морского обитателя был разработан так называемый нестационарный движитель, создающий тягу колебаниями несущей поверхности, имеющими конечную амплитуду (рис. 1.12). Некоторые исследователи считают, что принцип нестационарности движителя, по-видимому, и лежит в основе экономичности передвижения рыб и морских животных, так как они совершают туловищем и плавниками сложные изгибо-крутильные колебания, согласованные между собой таким образом, что при равномерном поступательном движении затрачивается очень небольшое количество энергии.
Русский художник и талантливый изобретатель Петр Васильевич Митурич, предложил использовать в качестве движителя гибкий корпус самого судна, совершающий волнообразные движения. Как указано в свидетельстве на изобретение №33 418 от 8 января 1930 г., движитель представлял собой: «приводимые во вращение изогнутые стержни, расположенные внутри эластичного корпуса, в целях сообщения этому корпусу при помощи шатунов, связанных со стержнями, волнообразного движения».
Пример 1.13. Парадокс Грея и эффекта Ламинфло
В 1936 г. английский зоолог Джеймс Грей установил, что сопротивление дельфина при его движении в воде, рассчитанное обычным для судостроения способом, оказывается в 8 — 10 раз больше того, которое способна преодолевать мускулатура животного. Ведь мышечная сила у всех млекопитающих, в том числе и китообразных, в пересчете на килограмм массы мышц примерно одинакова. Напрашивается вывод, что каким-то весьма эффективным способом дельфин снижает сопротивление своего туловища. Это несоответствие, получившее название «парадокс Грея», заставило начать работы в направлении, которое недвусмысленно подсказал сам профессор: «Природа сконструировала дельфина много совершенней, чем человек подводную лодку или торпеду».
В попытках разгадать «секрет дельфина» высказывались различные предположения. Большинство сходилось в том, что дельфин благодаря своей гладкой и эластичной коже в сочетании с жировым слоем демпфирует возмущения воды и тем самым создает вокруг себя ламинарный пограничный слой, снижая сопротивление. Механизм ламинаризации объясняли следующим образом: кожа животного представляет собой гладкую эластичную диафрагму, чувствительную к колебаниям давления, которые имеют место в пограничном слое, обтекающем дельфина. Под диафрагмой находятся каналы, наполненные жидкостью, которая, свободно перемещаясь в них под воздействием кожи-диафрагмы, действует как демпфер, поглощая часть кинетической энергии турбулентного потока и тем самым ламинаризируя пограничный слой.
Высказывалось мнение, что для значительного уменьшения сопротивления кожа дельфина должна не пассивно, а активно демпфировать возмущения в пограничном слое, для чего существует какой-то физиологический процесс, способный управлять изменениями свойств кожи. Известный французский исследователь океана, профессор О. Пикар высказал предположение, что нервные окончания в кожном покрове морских животных улавливают изменение давления, предшествующее переходу ламинарного режима обтекания в турбулентный, и через центральную нервную систему передают соответствующие сигналы на демпфирование кожи.
Кожа дельфина в передней части его туловища (особенно хорошо обтекаемой) почти не имеет кровеносных сосудов, в то время как к хвостовой части (где обычно возникает турбулентность и растет сопротивление) количество кровеносных сосудов постепенно возрастает. В связи с этим существует версия, что усиленная циркуляция крови пульсирующего характера в хвостовой части животного как бы демпфирует поверхность, уменьшая турбулентность потока.
Некоторые специалисты считают, что большая часть туловища дельфина участвует в создании движущей силы, т. е. туловище животного одновременно выполняет функции корпуса и движителя. В момент резких ускорений на коже возникают волнообразные складки, распространяющиеся от головы к хвосту, которые называют бегущей волной. При этом как бы сбрасываются возникающие турбулентные вихри, и снижается сопротивление. Но для образования бегущей волны необходимы мускульные усилия. Следовательно, управляющая кожей дельфина мускулатура должна непрерывно работать и постоянно находиться в напряжении, что изнурительно для животного. Исследователи осуществили оригинальный эксперимент, в котором участвовали профессиональные пловчихи и дельфины средней величины. Контуры тела женщины плавные, что вызвано особенностями костно-мышечного аппарата и сравнительно большим слоем подкожного жира. Под слоем жировой клетчатки и у дельфинов, и у женщин залегают локомоторные мышцы. Спортсменок буксировали под водой с разной скоростью. Испытания фиксировались на кинопленку. Обнаружилось, что при скорости свыше 4 уз на торсе и бедрах пловчих появлялись волнообразные складки. При снижении скорости складки исчезали. Известно, что у человека нет никаких специальных мышц для движения кожи и сама кожа для этого не приспособлена. Следовательно, волнообразные складки на теле спортсменок образовались под влиянием гидродинамического воздействия. Из эксперимента следовало, что мускулатура дельфина не принимает участия в образовании бегущей волны.
Интерес к скоростям качествам морских обитателей не ограничился предположениями и опытами. Одним из первых в 1938 г. немецкий ученый М. Крамер предложил обеспечивающее ламинарное обтекание корпуса покрытие, имитирующее наружный покров тюленей, для чего разместил на поверхности покрытия тонкие упругие проволочки, расположенные очень близко одна к другой и ориентированные вдоль набегающего потока. Крамер предполагал, что демпфирование турбулентных пульсации в пограничном слое будет осуществляться за счет сил трения между водой и проволочками. Опыты были прерваны с началом второй мировой войны. Позже Крамер сосредоточил внимание на изучении движения дельфинов с целью уменьшения сопротивления ракет и торпед. В последние два года существования фашистской Германии он возглавлял исследовательскую станцию управления ракетами и с небезызвестным В. Фон Брауном принимал участие в создании ракеты «ФАУ-2». Оказавшись после войны в США, Крамер продолжил исследования, направленные на создание покрытия для подводных лодок и торпед, названного «кожей дельфина».
Покрытие представляло собой сложную резиновую оболочку толщиной около 2 мм с гладкой наружной поверхностью (рис. 1.13). Внутренняя сторона оболочки множеством расположенных в шахматном порядке резиновых столбиков соединялась с внутренним слоем резины такой же толщины, наклеенным на поверхность корпуса подводной лодки. Пространство между столбиками, представляющее собой множество капиллярных сосудов, заполнялось органической жидкостью с относительно большой вязкостью. По замыслу Крамера, пока режим обтекания в пограничном слое будет ламинарным, покрытие должно вести себя как жесткая поверхность, при этом демпфирующая жидкость находится в покое, а поверхность диафрагмы остается гладкой. При возникновении в пограничном слое колебательных или волновых движений на гребне и впадине волны появится разность давлений, что вызовет распространение волнообразования вдоль покрытия и колебания резиновой оболочки, а через нее и демпфирующей жидкости. При этом турбулизация пограничного слоя должна снижаться, а вернее, переход ламинарного режима обтекания в турбулентный будет отодвигаться в область больших скоростей подводной лодки.
По аналогичному принципу было разработано покрытие «ламинфло», применение которого на торпедах позволило без изменения мощности двигателя существенно увеличить их скорость.
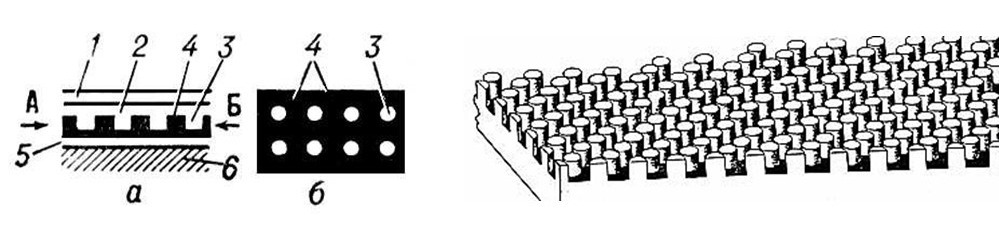
Искусственная кожа — обшивка «ламинфло»: а — боковой разрез; б — срез через слой палочек по линии АБ; 1 — верхний слой; 2 — средний слой; 3 — гибкие палочки среднего слоя; 4 — пространство между палочками, заполоненное демпфирующей жидкостью (черного цвета); 5 — нижний слой; 6 — корпус модели
Пример 1.14. Жиротрон
У двукрылых насекомых имеются придатки — жужжальца, которые непрерывно вибрируют вместе с крыльями. При изменении направления полета направление движения жужжалец не меняется, черешок, связывающий их с телом, натягивается, и насекомое получает сигнал об изменении направления полета. На этом принципе построен жиротрон (рис. 1.14) — вильчатый вибратор, обеспечивающий высокую стабилизацию направления полета самолета при больших скоростях. Самолет с жиротроном может быть автоматически выведен из штопора. Полeт насекомых сопровождается малым расходом энергии. Одна из причин этого — особая форма движения крыльев, имеющая вид восьмерки. На рис. 1.14 изображены: а — схема летящей мухи с колеблющимися по обе стороны тела жужжальцами; б — жужжальце; в — схема жиротрона; ток от генератора посылается попеременно то во внешние, то во внутренние электромагниты, что вызывает колебания вильчатого жировибратора.
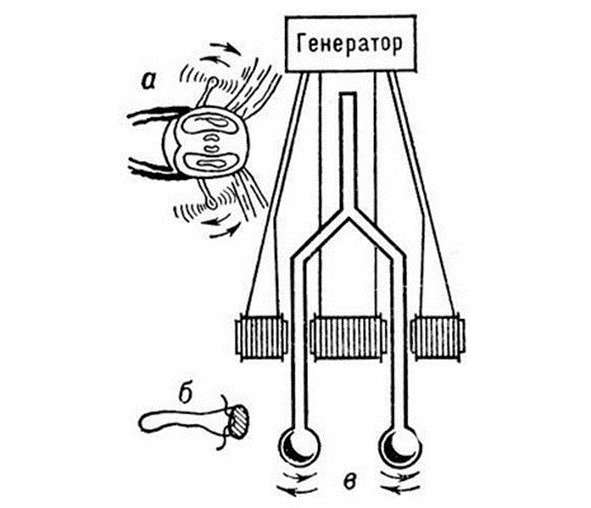
а — схема летящей мухи с колеблющимися по обе стороны тела жужжальцами; б — жужжальце; в — схема жиротрона
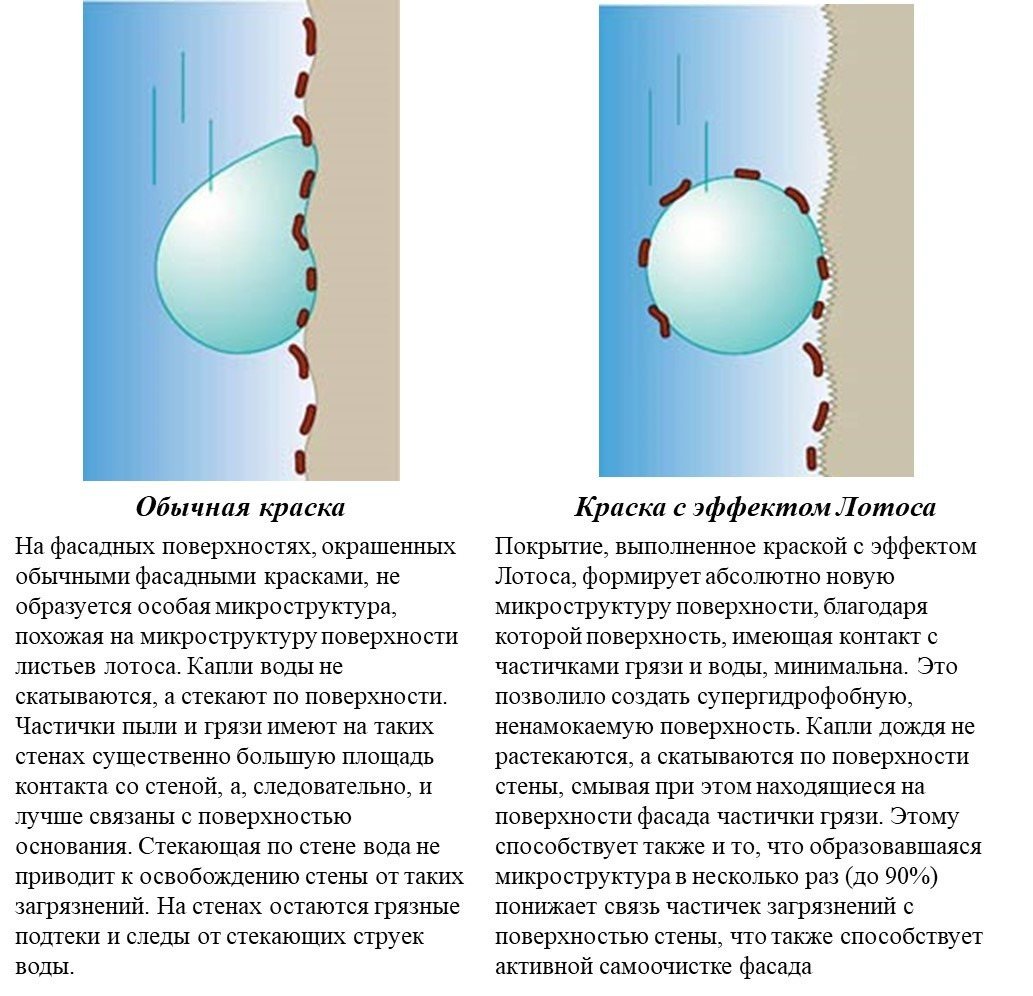
Пример 1.15. Эффекта Лотоса
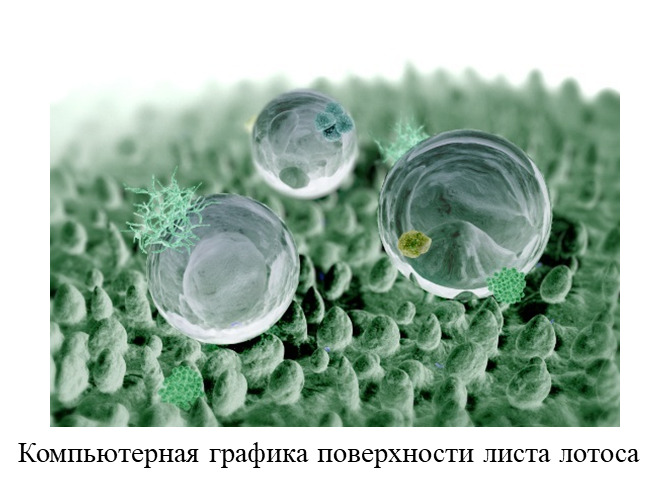
В природе давно подмечен феномен, характерный для листьев цветов лотоса — они никогда не намокают (рис. 1.15а). После дождя или полного погружения в воду они сразу же оказываются сухими и чистыми. На поверхности листьев лотоса вода образует капли, которые, словно шарики ртути, скатываются по поверхности листа, увлекая оказавшиеся на листе инородные частички. Это природное явление получило название «эффекта Лотоса».
Современные исследования выяснили механизм этого эффекта. При 7000-кратном увеличении листа его микроструктура оказалась в виде иголок (рис. 1.15 б). Эту структуру воспроизвели при создании краски.
Создана краска с эффектом Лотоса. Принцип ее действия показан на рис. 1.15 в, а ее эффективность — на рис. 1.15 г.


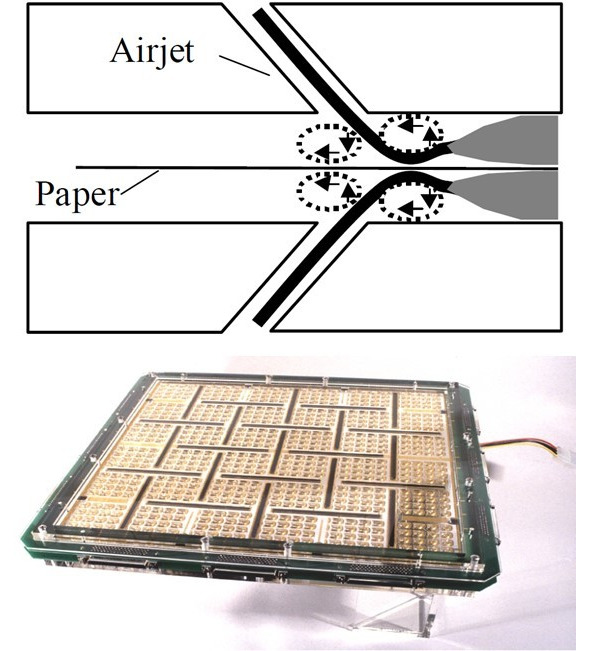
Пример 1.16. Новые принтеры
По аналогии с поведением стаи термитов, где каждый термит принимает независимые решения, но при этом стая движется к общей цели, например построению гнезда, в исследовательском центре Xerox в Пало Альто разработали новую технологию подающего механизма для копиров и принтеров, названного AirJet. Печатное устройство оснащено множеством воздушных сопел, каждое из которых действует независимо, без команд центрального процессора, однако в то же время они способствуют выполнению общей задачи — продвижению бумаги. В устройстве отсутствуют подвижные части, что позволяет удешевить производство и делает устройство более надежным. Устройство содержит 144 набора по 4 сопла, направленных в разные стороны, а также 32 тыс. оптических сенсоров и микроконтроллеров (рис. 1.16).
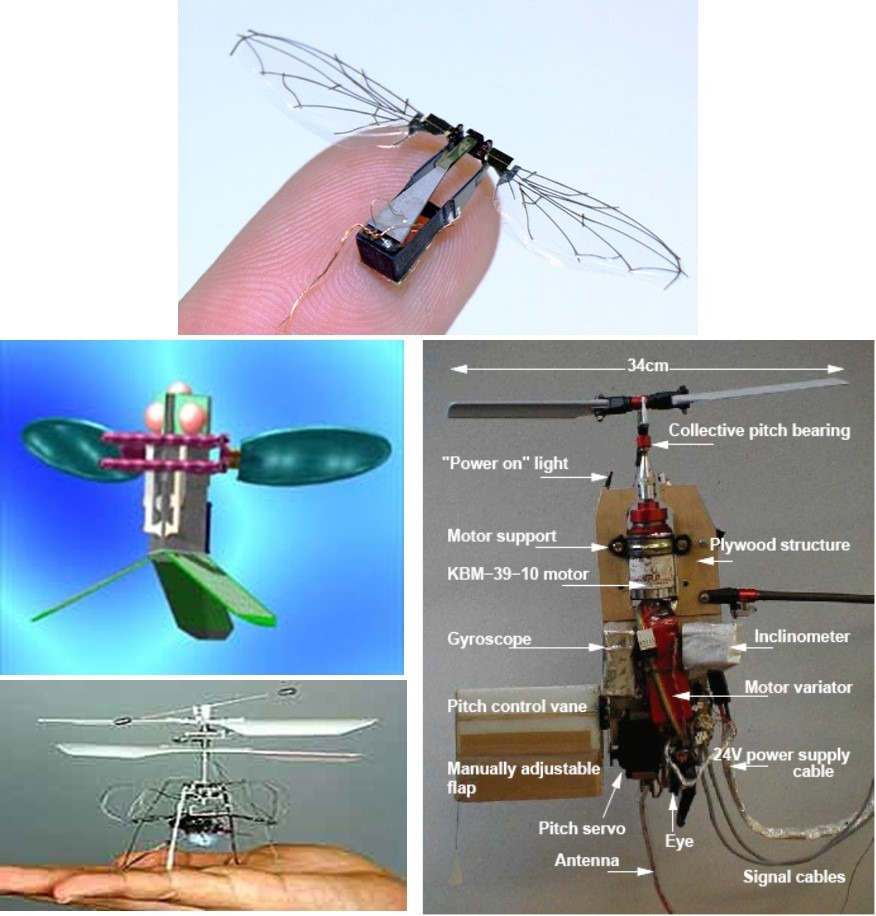
Пример 1.17. Робомуха
Ученые из Калифорнийского университета в Беркли (University of California at Berkeley) работают над созданием крошечного робота, который имеет массу всего 0,1 грамма. Он может ползать по поверхности и летать (рис. 1.17). Робот имеет миниатюрные полиэстеровые крылья с металлическим каркасом. На крыльях размещены крошечные солнечные батареи. Механический привод позволяет крыльям двигаться со скоростью до 150 махов в секунду: при этом оба крыла могут независимо друг от друга поворачиваться в сторону. Возможная область применения робомухи будет от уничтожения насекомых-вредителей и до промышленного шпионажа.
На рис. 1.17а показаны альтернативные конструкции робомух.
Пример 1.18. РобоПчелы
Инженеры из Гарвардского университета под руководством Роба Вуда и Института Висса разрабатывают микророботов, имитирующих поведение пчел в их естественной среде обитания. Эти микродроны можно использовать для различных целей, в том числе для исследования труднодоступных мест. Они способны летать и выполнять широкий спектр задач, имитируя поведение настоящих пчел.

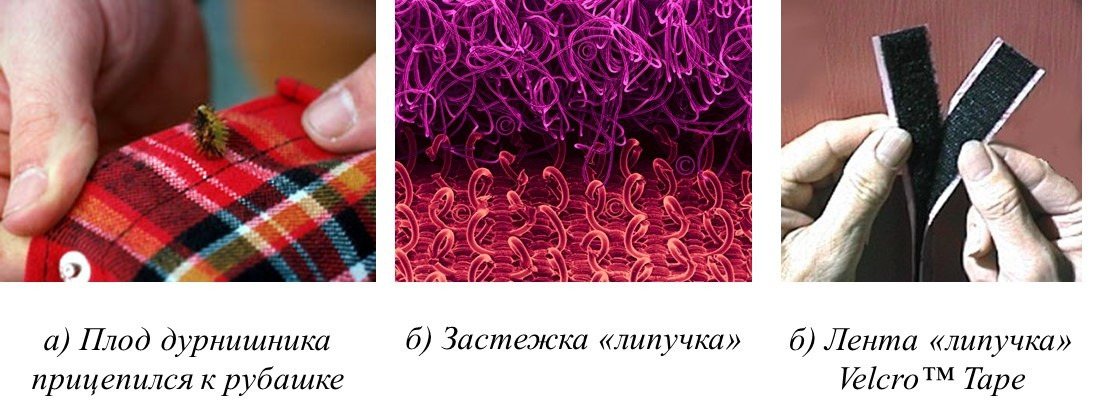
Пример 1.19. Застежка-«липучка»
Швейцарский инженер Джордж де Местраль (Georges de Mestral) в 1955 году, гуляя со своей собакой, заметил, что к ее шерсти постоянно прилипают какие-то непонятные растения. Устав постоянно чистить собаку, инженер решил выяснить причину, по которой сорняки прилипают к шерсти. Исследовав феномен, де Местраль определил, что он возможен благодаря маленьким крючкам на плодах дурнишника (так называется этот сорняк). В результате инженер осознал важность сделанного открытия и через восемь лет запатентовал удобную «липучку» Velcro, которая сегодня широко используется при изготовлении одежды. Застежка-«липучка (репейник)» состоит из двух прочных лент, лицевая сторона, одной из которых покрыта петлями из полиамидных мононитей, а лицевая сторона второй — петлями из мононитей с боковым разрезом, т. е. крючками (лента петельная и лента крючковая). При соединении двух лент крючки входят в петли, и происходит быстрое и прочное сцепление. Разъединение двух лент требует значительного усилия (рис. 1.19).
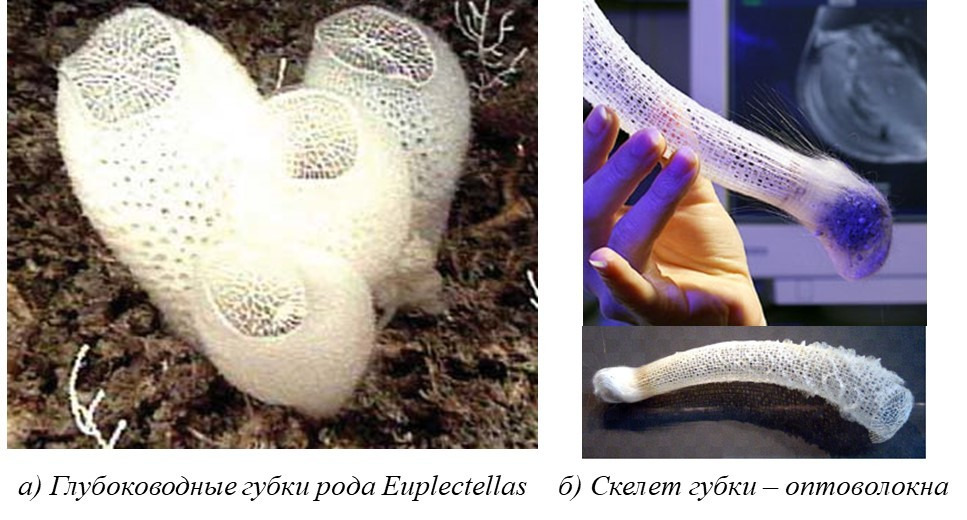
Пример 1.20. Глубоководная губка — оптоволокно
Исследователи из Bell Labs (корпорация Lucent) в 2003 году обнаружили в теле глубоководных губок рода Euplectellas (рис. 1.20) высококачественное оптоволокно. Материал скелета этих губок может пропускать цифровой сигнал не хуже, чем современные оптоволоконные кабели, при этом природное оптоволокно значительно прочнее искусственного благодаря наличию органической оболочки. Вторая особенность — это возможность формирования подобного вещества при температуре около нуля градусов по Цельсию, в то время как на заводах Lucent для этих целей используется высокотемпературная обработка. Осталось придумать, как увеличить длину нового материала, поскольку скелеты морских губок не превышают 15 см.
Пример 1.21. Модель нейрона
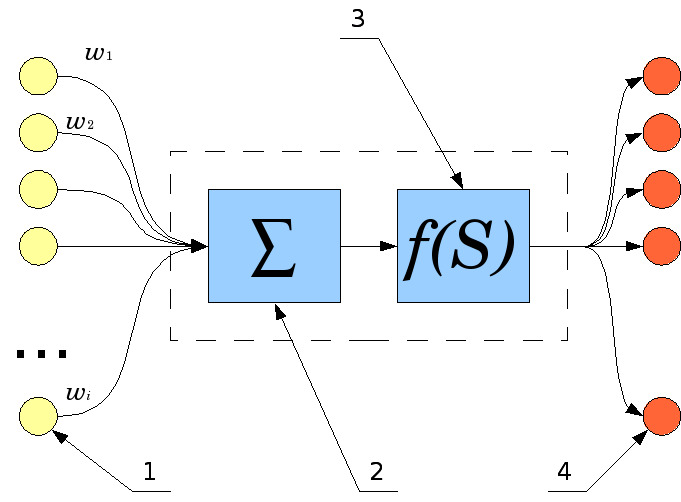
Схема искусственного нейрона
1. Нейроны, выходные сигналы которых поступают на вход данному.
2. Сумматор входных сигналов. 3. Вычислитель передаточной функции. 4. Нейроны, на входы которых подаётся выходной сигнал данного.
5. Веса входных сигналов
С каждым годом появляется все больше патентов на нейронные сети, например, патент США US9842585B2 компании Microsoft.
Компания Google разработала нейрочип Tensor Processing Unit (TPU) отвечающий за идентификацию объектов и лиц на фотографиях, распознавание голоса на Android-смартфонах, а также перевод текста с одного языка на другой.
Пример 1.22. Изучение насекомых
Представьте, что нейронная сеть в мозге насекомых, основанная на кодировании небесного компаса, можно сравнить с использованием ориентиров в навигации многими членистоногими и позвоночными. Давайте рассмотрим аналогию с пустынной саранчой Schistocerca gregaria.
Небесный компас в мозге
В мире насекомых, таких как пустынная саранча, путешествующая на большие расстояния, небесные сигналы играют роль своего рода компаса для пространственной ориентации.
Как это работает:
1. Ориентирование по небесным сигналам
Насекомые используют небесные ориентиры, такие как положение Солнца днем и звезды ночью, чтобы определить свое местоположение и направление.
2. Фоторецепторы и глаза
Особые фоторецепторы в сложных глазах на спинном крае насекомого чувствительны к поляризации небесного света, который создается рассеянным солнечным светом.
3. Информационное сочетание
Сигналы поляризации сочетаются с информацией о положении солнца в зрительной доле и переднем зрительном бугорке.
4. Центральный комплекс
Сигналы сливаются в мозге насекомого, в структуре, известной как центральный комплекс, где формируется кодирование направления головы.
5. Компас-подобные столбцы
Наподобие компаса, столбцы в мозге насекомого располагаются так, чтобы сигнализировать солнечный азимут в пределах 360° пространства.
6. Интеграция других сигналов
Дополнительные сигналы, такие как направление ветра и внутреннее самовращение, вероятно, интегрируются для более точной навигации.
7. Управление движением и полетом
Полученные сигналы передаются нейронам для управления направлением движения и полета насекомого.
Таким образом, эта аналогия демонстрирует, как насекомые, подобно тому как мы используем компас, интегрируют небесные сигналы для эффективной пространственной ориентации в своих миграциях.
Подробнее смотри в статье.
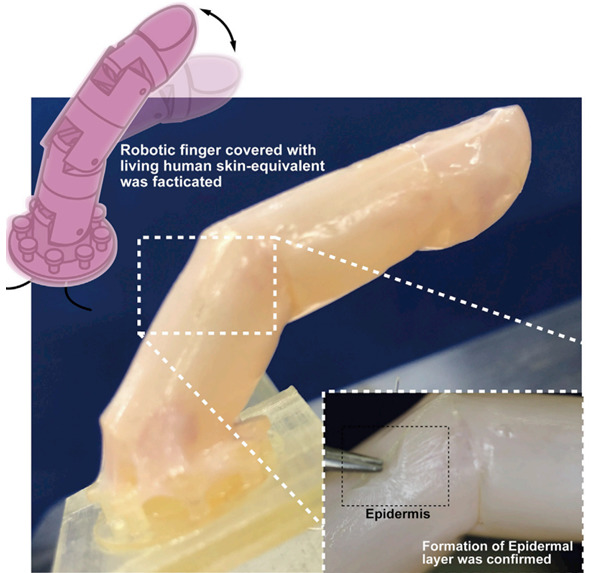
Пример 1.23. Кожа для роботов
Представьте, что у роботов тоже есть своя версия «кожи», созданной японскими учеными из Токийского университета под руководством профессора Сёдзи Такеучи. Эта искусственная кожа не просто имитирует естественную, но и воспроизводит ее удивительные свойства.
Чтобы сделать роботов более человечными и функциональными, ученые разработали своеобразный «эквивалент кожи» — живую модель, состоящую из клеток и внеклеточного матрикса. Представьте ее как невероятно умный и самовосстанавливающийся материал, который покрывает роботов так, словно это настоящая кожа для человека.
Они даже создали трехсуставный роботизированный палец, покрытый этим удивительным эквивалентом кожи. Интересный момент: они разработали метод покрытия трехмерных объектов этим материалом, подобно тому, как мы надеваем одежду.
К тому же, ученые вдохновились методами лечения глубоких ожогов, где используют гидрогели. Они продемонстрировали, что этот эквивалент кожи может не только покрывать роботов, но и помогать им заживлять раны. Именно как человеческая кожа образует новые слои после повреждения, эта искусственная кожа робота поддерживает процесс заживления.
Это исследование открывает новые перспективы использования искусственной кожи в робототехнике. Кто знает, возможно, в будущем роботы будут обладать не только искусственным интеллектом, но и своей версией «кожи», придающей им уникальные человекообразные черты и способности. (рис. 1.22).
Пример 1.24. Глаз насекомого
В Университете Беркли разработали первый «фасеточный» объектив для фотокамеры, который воспроизводит устройство глаза насекомых. Объектив склеен из 8500 шестиугольных микролинз, а его поле зрения больше, чем у традиционных «широкоугольников». Диаметр устройства — 2,5 миллиметра, и теперь главная проблема заключается в том, чтобы изготовить электронную матрицу подходящих размеров и формы.
В отличие от высших животных, насекомые (рис.1.23а) лишены сетчатки. Каждой фасетке (то есть «линзе») глаза соответствует отдельный рецептор, фиксирующий яркость (и, возможно, другие характеристики света), но не детали (рис.1.23б). Целостное изображение складывается из «пикселей», переданных рецепторами, и поэтому разрешающая способность глаза очень высока.
В искусственном «глазе» стеклянные микролинзы покрывают полусферу из эпоксидной смолы, внутри которой проходят микроканалы-волноводы — они заменяют нервные волокна насекомого, передающие оптический сигнал от каждой фасетки мозгу (рис.1.23в). Изготовление волноводов и было самой нетривиальной частью задачи. Для этого сплошную «заготовку» объектива пришлось облучать ультрафиолетовым светом — чтобы, преломляясь в линзах, свет проделал каналы, подходящие в точности к каждой из них.
Фасеточная камера, говорят разработчики, может понадобиться медикам и ученым, изучающим труднодоступные полости живых существ или искусственных тел. Кроме того, исследованием заинтересовалось военное агентство DARPA, согласившееся его финансировать. Известно, что прежде эта организация поддерживала проект Micromechanical Flying Insect, целью которого было создание полноценного «механического насекомого».
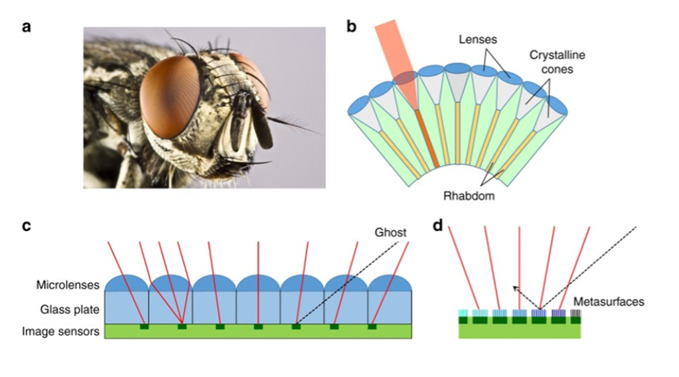
a) Микрофотография сложных глаз слепня. Используется с разрешения (авторские права: Michael Biehler/123RF.COM).
б) Схематическая иллюстрация аппозиционной архитектуры сложных глаз.
в) Камера с искусственным сложным глазом на основе планарной матрицы микролинз и матрицы фотоприемников, разделенных стеклянной пластиной. По конструкции две матрицы имеют разную периодичность, так что каждый датчик обнаруживает свет, падающий в разном направлении. d Камера со сложным глазом, основанная на углово-чувствительных метаповерхностях, разработанных в настоящей работе, где на каждый датчик изображения передается только свет, падающий в разных направлениях.
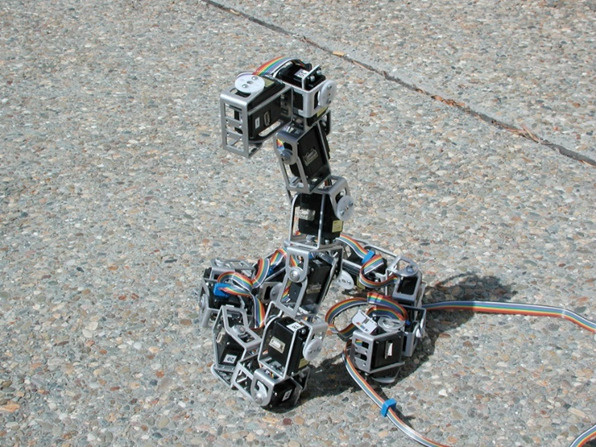
Пример 1.25. Робот-змея
По аналогии с движением змеи группа специалистов из University of Michigan разработала робот, передвигающийся как змея (рис. 1.24). Его назвали OmniTread. Движитель OmniTread занимает 80% его поверхности. Роботом управляет оператор с помощью жеста.
Робот способен двигаться по канавам, трубам и стенам.
Пример 1.26. Касатка
По аналогии с касаткой (рис. 1.25а) было разработано быстроходное судно (рис. 1.25б).
Двое изобретателей из США и Новой Зеландии сконструировали бионического дельфина, который очень похож на свой природный прототип (рис. 1.25в). Он приводится в движение с помощью мотора от обычного водного мотоцикла «Ямаха». По словам одного из изобретателей, новозеландца Роба Иннеса, мощность двигателя — 110 лошадиных сил. Он оборудован трансмиссией фирмы Velvet Drive с передаточным числом 2 к 1. Искусственный дельфин в точности повторяет манеру движения своего биологического прототипа и может даже выпрыгивать из воды. Бионика — наука, которая совмещает биологию и технику. От биологии были взяты аэродинамические параметры, которые были максимально приближены к природным.
Искусственный дельфин может развивать скорость до 50 км/ч и кратковременно нырять на глубину, при которой на поверхности виден только верхний плавник дельфина, чтобы потом выпрыгнуть из воды (все как в природе).

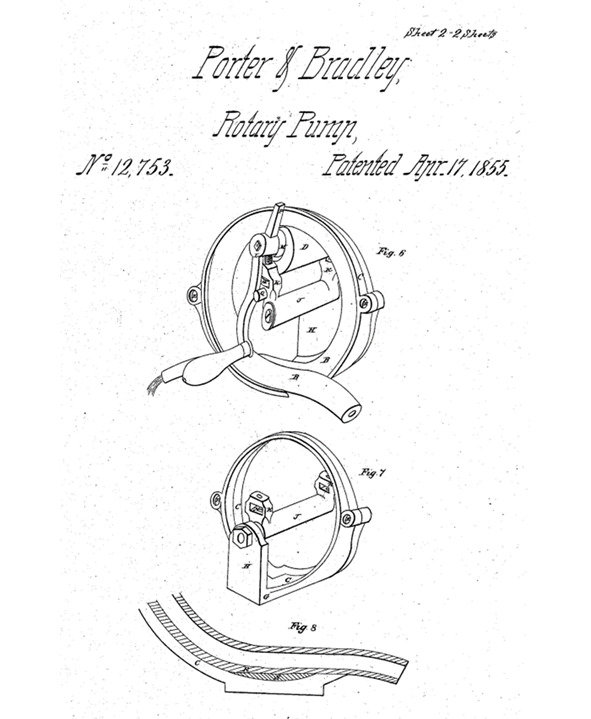
Пример 1.27. Перистальтический насос
Перистальтический насос — аналог кишечника живого организма. Этот насос предназначен для перекачивания пульпы — вязкого вещества и абразивных пульпообразных сред.
Форма перистальтического насоса была описана в журнале «Механика» в 1845 году. В насосе использовался кожаный шланг, который не должен был самостоятельно открываться при отпускании роликами, вместо этого он полагался на то, что поступающая вода имеет достаточное давление для заполнения открытого впускного конца каждый цикл. Перистальтический насос был впервые запатентован в США Руфусом Портером и Дж. Д. Брэдли в 1855 году (патент США №12753) (рис. 1.26) как скважинный насос, а затем Юджином Алленом в 1881 году (патент США №249285) для переливания крови. Он был разработан кардиохирургом доктором Майклом Дебейки для переливания крови, когда он был студентом-медиком, в 1932 году и позже использовался им для систем искусственного кровообращения В 1992 г. для систем искусственного кровообращения был разработан специализированный неокклюзионный роликовый насос (патент США 5222880) с использованием мягких плоских трубок.
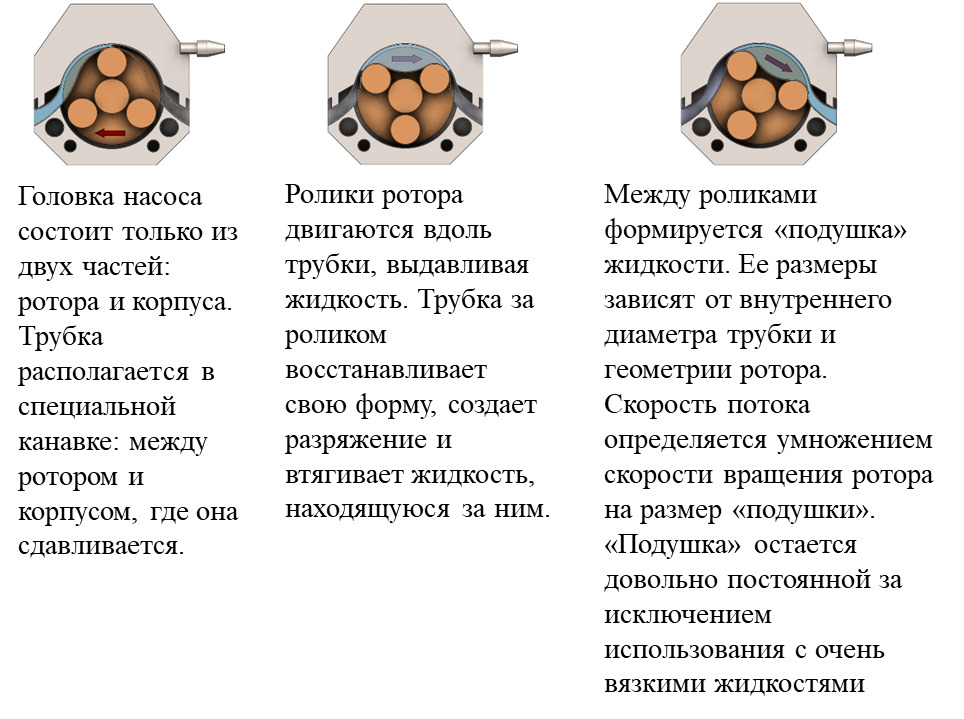
Насос (рис. 1.27) содержит шланг (гибкий цилиндр), расположенный в подковообразном корпусе, и три ролика, закрепленные на роторе. При вращении ротора ролики поочередно подводятся к шлангу, постепенно пережимая его и прокатываясь по корпусу. При сплющивании шланга ролик передвигает впереди себя перекачиваемую среду. Гибкий шланг позади ролика восстанавливает свою первоначальную форму и всасывает новую порцию жидкости за счет создаваемого разряжения. Затем подходит следующий ролик и вновь пережимает шланг, перекатываясь по корпусу. При вращении роторов все процессы в насосе повторяются. Основным преимуществом данного семейства насосов является тот факт, что перемещаемая жидкость контактирует только с выбранной Вами рабочей трубкой, а не с насосом, что позволяет продлить жизнь насоса и не загрязняет перемещаемую жидкость.
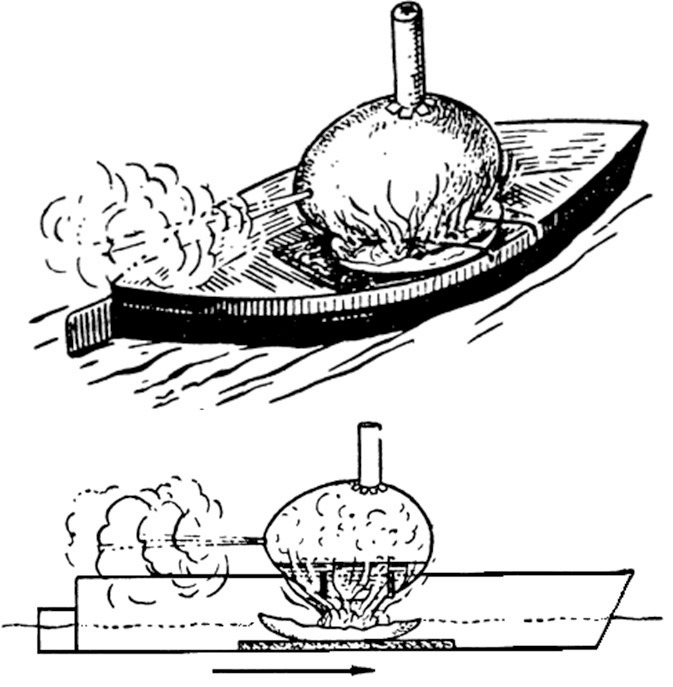
Пример 1.28. Судно-кальмар
Кальмар, как известно, передвигается резкими толчками, выбрасывая назад воду. Судно приводится в движение также реактивной отдачей. Пар выталкивает воду из трубы, направленной к корме судна. От этого толчка судно получает импульс. Оставшийся в трубе пар конденсируется, давление в котле падает, и всасывается очередная порция воды. Теперь котел снова готов к рабочему циклу. Разумеется, это лишь грубая схема, сама конструкция несколько сложнее. Достоинства такого двигателя — отсутствие движущихся частей.
Модель этого судна легко построить. Простейший корпус из жести, закрепленная на нем баночка из-под гуталина, две впаянные в корпус трубочки и спиртовка из крышки от бутылки с лимонадом (рис. 1.28).
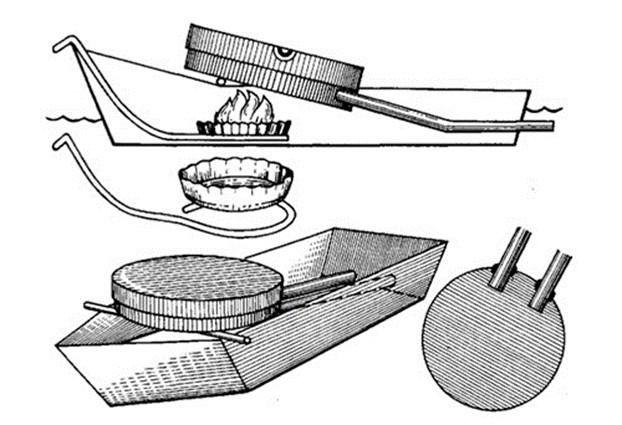
Рассмотрим еще одну модель реактивного судна (рис. 1.29).
Модель лодочки делается из бумаги, и ее красят водонепроницаемой краской.
На бортиках укрепляют перекладины, выгнутые из проволоки, скрепок или шпилек.
В узком конце яйца осторожно делают маленькое отверстие, из которого выпускают все содержимое. На яйце можно сделать из бумаги трубу для декорации. На дно лодочки кладут кусок пробки, а на нее — часть яичной скорлупы. Наливают в яйцо немного воды так, чтобы она не достигала уровня отверстия. В скорлупу на дне лодки кладут кусок ваты, смоченной спиртом, или кусок сухого спирта. Горение должно быть энергичное, чтобы вода быстро закипела. Как только вода закипит и появится пар, лодочка двинется вперед.
Пример 1.29. Антенны москита — прообраз нового микрофона
Профессор Дэниел Роберт (Daniel Robert) и его коллеги из университета Бристоля изучают «уши» саранчи и антенны москита, чтобы научиться создавать необычайно чувствительные микрофоны.
Саранча слушает с помощью крошечных мембран, толщиной всего в микрон (рис. 1.30). Они обладают рядом интересных механических свойств и колеблются в ответ на звуки, с амплитудой в какие-то нанометры. Москиты также «вооружены» необычными микрофонами — антеннами с 15 тысячами сенсорных клеток.
Даниель Роберт поясняет суть работы: «Мы нашли, что различные звуковые частоты вызывают совершенно разный механический отклик в системе слушания саранчи. Изучая эти крошечные движения и понимая, как слабые звуковые волны превращены в механические „ответы“, мы, в конце концов, сможем проектировать микрофоны, основанные на этих природных слуховых системах. Они могли бы обнаруживать крайне слабые звуки и анализировать их спектр. Это то, что нынешние микрофоны сделать не в состоянии».
Для анализа строения и работы слуховых систем насекомых авторы этого исследования применяют самые разнообразные методы: лазерную доплеровскую виброметрию, атомный силовой микроскоп и так далее, составляя трехмерные компьютерные модели.
Ученые особо подчеркивают, что это успешное исследование стало возможным благодаря мультидисциплинарному подходу — объединению в одну команду биологов, физиков и инженеров.

(фото Daniel Robert)
Пример 1.30. Рефлектор «кошачий глаз»
Рефлектор «кошачий глаз» — это устройство для отражения света (отражатель), применяемое на дорогах в опасных местах для обеспечения безопасности движения.
История изобретения «кошачьего глаза» имеет свою предысторию.
Перси Шоу, английский изобретатель, который не был ни ученым, ни инженером, а работал дорожным мастером, однажды возвращался домой поздно ночью. Было темно, и он не заметил, что едет по краю дороги возле обрыва. Спасли Перси Шоу два огонька света, мелькнувшие на обочине, они помогли ему сориентироваться. Это были глаза бродячего кота, в которых отразился свет фар машины Перси Шоу.
Благодаря этому случаю, Перси Шоу изобрел рефлектор — устройство, работающее по принципу кошачьего глаза и размечающее обочины дороги в темное время суток. Рефлектор Перси Шоу не только подсвечивал дорогу ночью, но и мог самоочищаться дождевой водой.
В 1934 году Перси Шоу запатентовал свое изобретение и основал фабрику, производящую рефлекторы «кошачий глаз». Для испытания он установил 50 рефлекторов на опасных участках дороги и количество несчастных случаев резко уменьшилось.
В 1937 году Перси Шоу выиграл конкурс, объявленный правительством Англии, на лучший дорожный рефлектор, и уже через несколько лет он обеспечивал рефлекторами не только дороги Англии, но и большинство дорог мира.
В настоящее время рефлекторы бывают не только белыми, как во времена Перси Шоу, но и других цветов. Красные рефлекторы устанавливают для обозначения края больших дорог, зелеными рефлекторами обозначают перекрестки. Есть рефлекторы, использующие солнечную энергию и излучающие собственный свет, но все они сконструированы по принципу рефлектора «кошачий глаз» Перси Шоу и предназначены для того, чтобы машины, мотоциклы, велосипеды и другой транспорт могли безопасно передвигаться по дороге.,

Пример 1.31. Присоски
Осьминог (рис. 1.32а) охватывает свою жертву щупальцами, на которых находятся ряды присосок. Так он крепко захватывает жертву. Кроме того, присоски помогают двигаться по скользким поверхностям.
Присоски имеются и у других животных, например, квакша (рис. 1.32б). Она, имея на ногах присоски, необычайно ловко держится на гладких и скользких листьях растений.
В технике очень много различных применений присосок. Они используются для крепления предметов к гладким поверхностям или переноса, например, стекол. Обувь мойщиков окон высотных зданий оснащена присосками для обеспечения их безопасной фиксации и т. д. (рис. 1.32в).

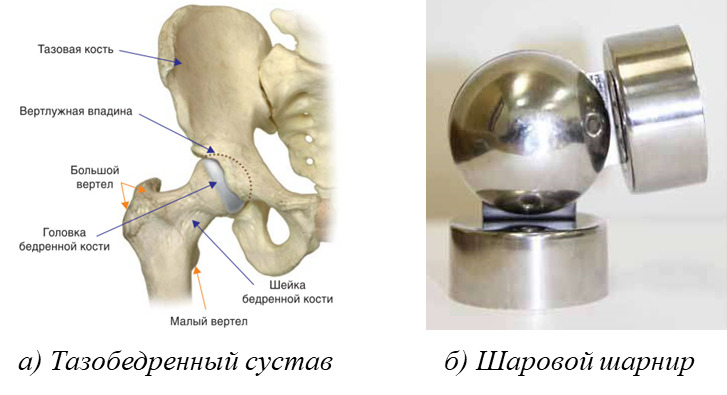
Пример 1.32. Шарниры
Шарнир (рис. 1.33б) — это подвижное соединение двух частей, которое обеспечивает им вращательное движение.
Шарниры были изобретены по аналогии с суставами животных и людей (рис. 1.33а).
Архитектоника — это архитектурная бионика, использование природных форм в строительстве и архитектуре.
Если не считать проекты Леонардо да Винчи по мостам, то первые попытки использовать природные формы в строительстве предпринял Антонио Гауди. Это был прорыв. Парк Гуэль, Каза Батло, Каза Мила и многие другие шедевры, созданные им, — это «природа, застывшая в камне». Эти шедевры великого мастера дали толчок к развитию архитектуры в бионическом стиле. Продемонстрируем некоторые из них.
Пример 1.33. Парк Гуэль (рис. 1.34).
Антонио выполняет для семейства Гуэль проекты павильонов виллы в Педральбесе близ Барселоны; винных погребов в Гараффе; часовни и крипты Колонии Гуэль (Санта Колома де Сервелло); фантастического Парка Гуэль (Барселона).

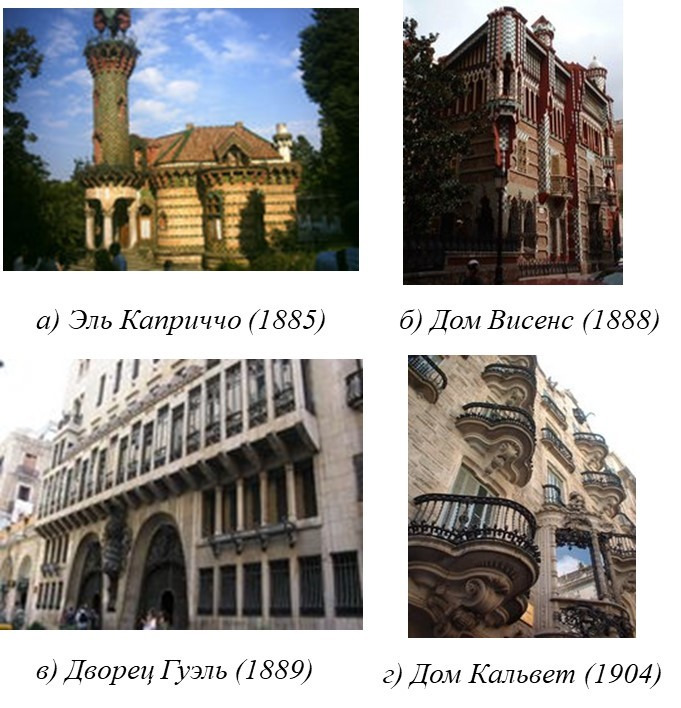
Пример 1.34. Эль Каприччо, дома Висенc и Кальвет
В период раннего творчества, отмеченный влияниями архитектуры Барселоны, а также испанского архитектора Марторела, строятся его первые, богато декорированные, относящиеся к раннему модерну проекты: «стилистические близнецы» — нарядный Дом Висенс (Барселона) и причудливый Эль Каприччо (Комильяс, Кантабрия); также компромиссный псевдобарочный Дом Кальвет (Барселона) — единственное здание, признанное и любимое горожанами при его жизни.
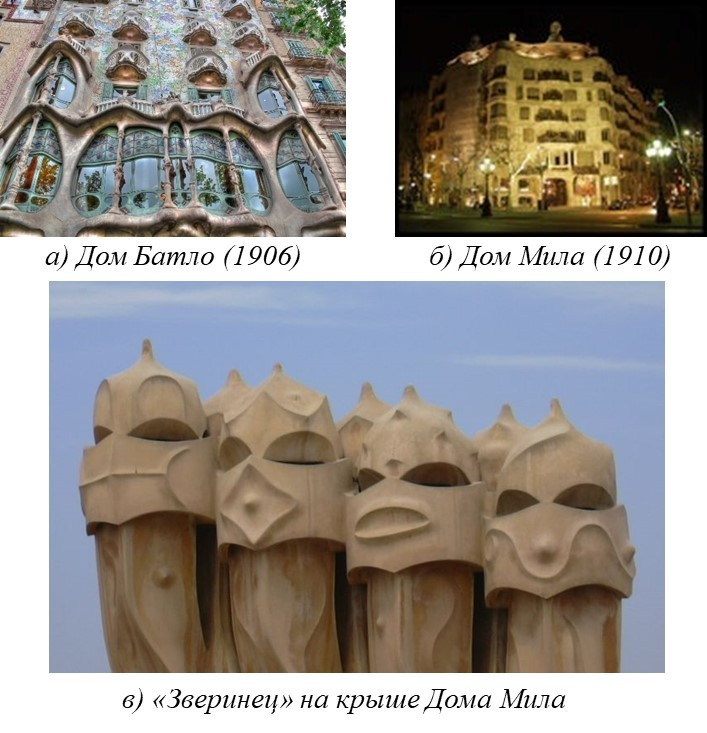
Пример 1.35. Дома Батло и Мила
Антонио Гауди-и-Корнет, став самым модным архитектором в Барселоне, вскоре превратился в «практически непозволительную роскошь». Для буржуа Барселоны он строил дома один необычнее другого: пространство, которое рождается и развивается, расширяясь и двигаясь, как живая материя — Дом Мила; живое трепещущее существо, плод причудливой фантазии — Дом Батло.
Заказчики, готовые выкинуть на строительство пол состояния, изначально верили в гениальность архитектора, без всяких усилий пролагающего новый путь в архитектуре.
Пример 1.36. Церковь Саграда Фамилия
В 1891, когда Гауди было за 30, Общество почитателей Святого Иосифа предложило ему продолжить начатый в 1882 году Собор Святого Семейства (Саграда Фамилия), строительству которого он посвятил все последующие годы жизни, оставив в 1914 г. архитектурную практику.

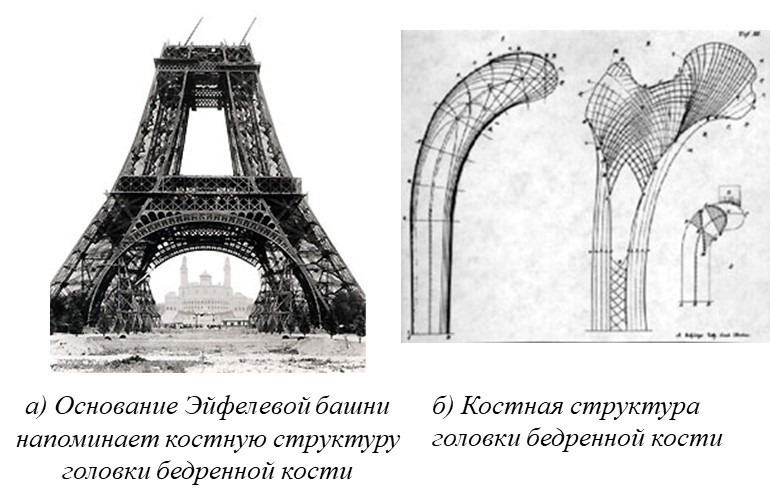
Пример 1.37. Эйфелева башня
Конструкция Эйфелевой башни (рис. 1.38) основана на научной работе швейцарского профессора анатомии Хермана фон Мейера (Hermann Von Meyer).
За 40 лет до сооружения парижского инженерного чуда профессор исследовал костную структуру головки бедренной кости (рис. 1.38б) в том месте, где она изгибается и под углом входит в сустав. И при этом кость почему-то не ломается под тяжестью тела.
Фон Мейер обнаружил, что головка кости покрыта изощренной сетью миниатюрных косточек, благодаря которым нагрузка удивительным образом перераспределяется по кости. Эта сеть имела строгую геометрическую структуру, которую профессор задокументировал.
В 1866 году швейцарский инженер Карл Кульман (Carl Cullman) подвел теоретическую базу под открытие фон Мейера, а спустя 20 лет природное распределение нагрузки с помощью кривых суппортов было использовано Эйфелем.
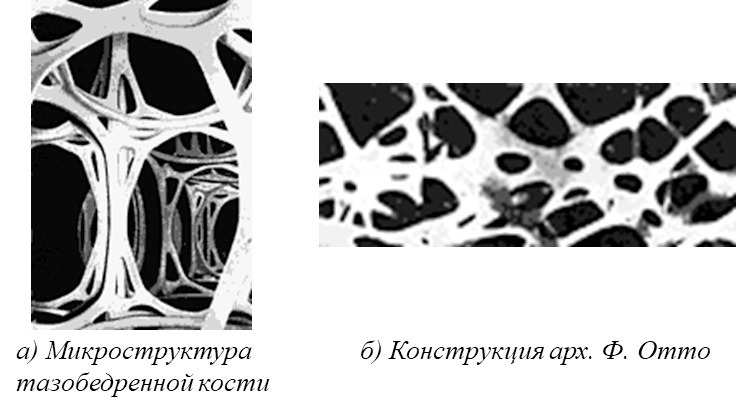
Пример 1.38. Опоры сложной нагрузки
Структура бедренной кости (рис. 1.39а) может послужить образцом для конструирования опор со сложной нагрузкой (рис. 1.39б). Стержни решетки расположены в соответствии с траекториями главных напряжений.
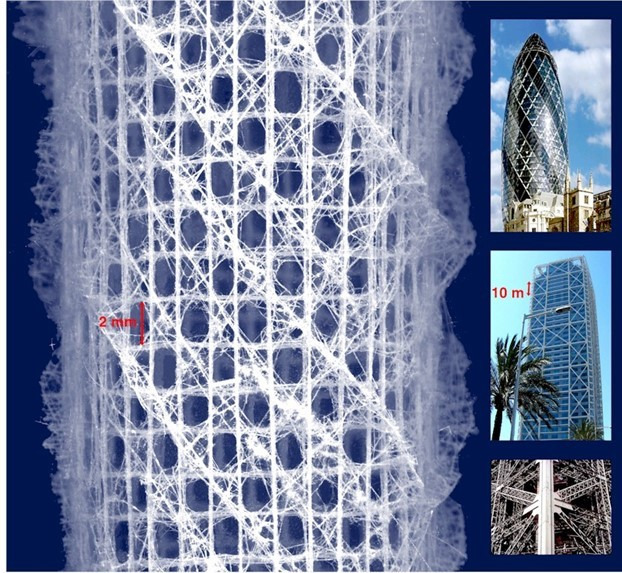
Пример 1.39. Структура строения глубоководной губки
Исследования, проведенные в Bell Labs в 2005 году, показали, что скелет тропической глубоководной губки Euplectellas имеет очень прочную структуру, которую можно использовать в широком диапазоне, от создания новых материалов на наноуровне до современных архитектурных сооружений.
Скелет губки чрезвычайно прочен и гибок и противостоит воздействию хищников. Он состоит из пучков стекловолокон, тоньше человеческого волоса, скрепленных органическим клеем.
Структурные детали скелета морской губки соответствуют инженерным принципам, используемым в конструкциях зданий, таких как Swiss Re Tower в Лондоне, отеле De Las Artes в Барселоне и Эйфелевой башне в Париже. На рис. 1.40 показано сравнение в масштабе 1:1000.
Структура скелета губки состоит из волокон, скрепленных в виде решетки, укрепленные другими волокнами крест-накрест, расположенными по диагонали в обоих направлениях в дополнительных квадратах. Внешняя часть структуры укреплена «горными хребтами», препятствующими разрушению.
Пример 1.40. Дом — листья подорожника
Архитектура 3-этажного дома (рис. 1.41) повторяет спиралевидное расположение листьев подорожника, обеспечивающее лучшую освещенность солнцем.

Пример 1.41. Крыша — цветок
Мир живой природы динамичен. В зависимости от времени суток, т.е. освещенности, открываются или закрываются лепестки таких цветов, как цирконий, мак, шиповник и др. Перед переменой погоды меняют свою пространственную форму листья клевера, папоротники и др. В биологии такие движения называют обратимыми, а в архитектуре — трансформациями.
По аналогии с закрыванием и открыванием лепестков цветка группой архитекторов создан проект крыши стадиона в Киеве в виде цветка, лепестки которого поднимаются и опускаются в зависимости от погоды (рис. 1.42).
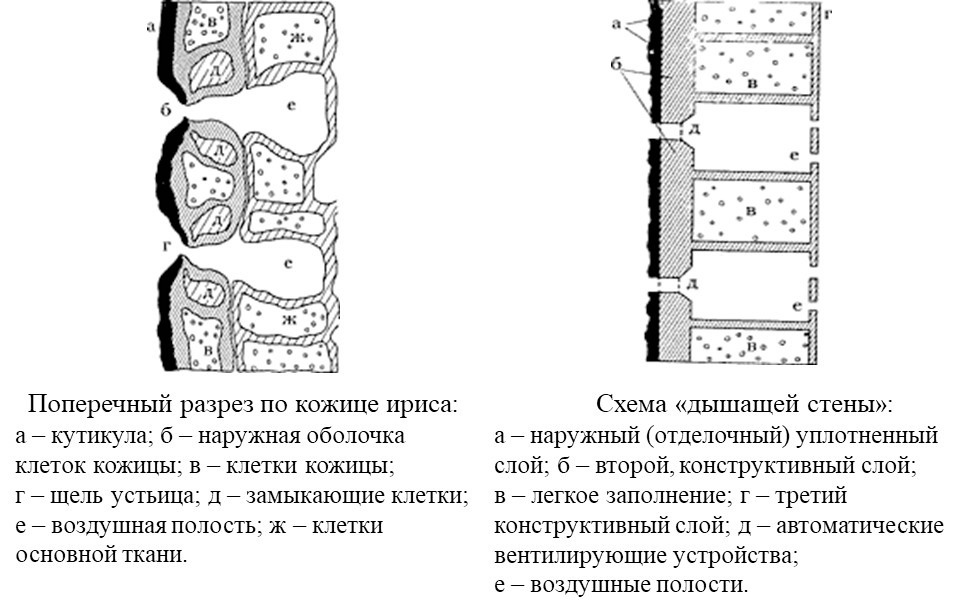
Пример 1.42. Дышащая стена
По аналогии с кожицей ириса создали «дышащую стену» (рис. 1.43).
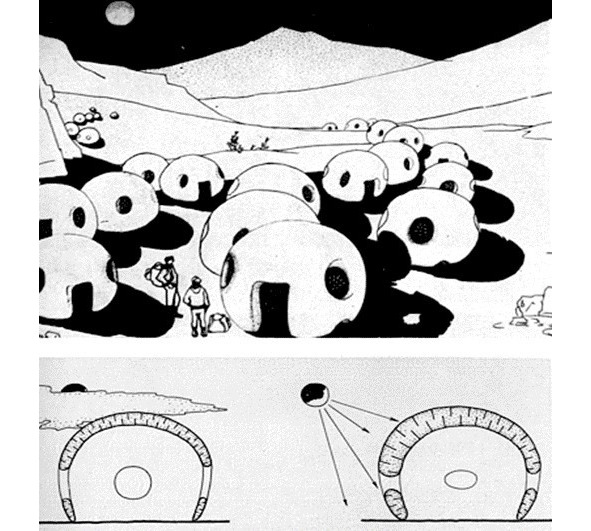
Пример 1.43. Надувные палатки
Использование свойства расширения воздуха или каких-либо смесей газов при нагревании создает возможность автоматического регулирования микроклимата в пневматических сооружениях. Эффект увеличения изоляции может дать автоматическое увеличение толщины двухслойного покрытия надувных оболочек при нагреве и уменьшение толщины при охлаждении. Используя эту идею, архитектор Ю. Лебедев предложил проект-идею туристического городка. Надувные палатки, саморегулирующие солнечную радиацию (рис. 1.44). Наверху показан общий вид туристического городка, а внизу — взаимодействие формы и солнечных лучей (разрез палатки).
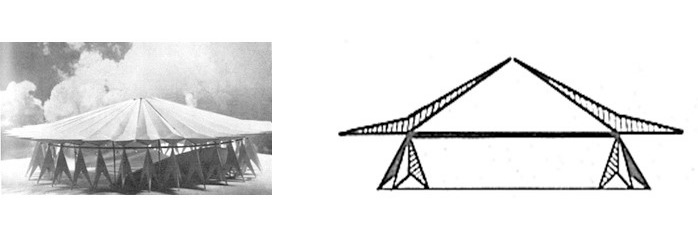
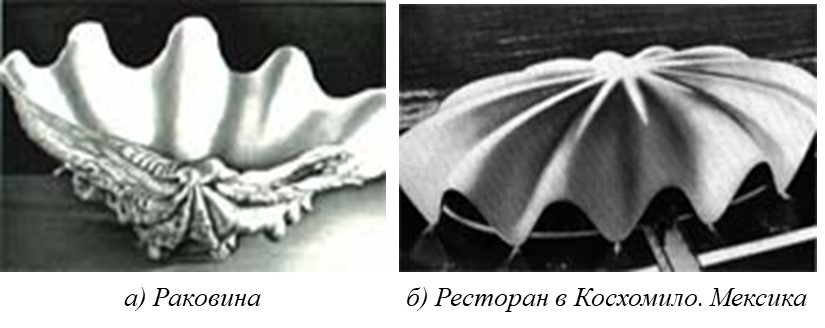
Пример 1.44. Ресторан — раковина
По аналогии с формой раковины мексиканский архитектор Ф. Кандела спроектировал ресторан в Косхомило в Мексике (рис. 1.45).
Пример 1.45. Вертикальный бионический город-башня (Vertical city bionic tower)
Испанские архитекторы, супруги Хавьер Пиоз (Javier Pioz) и Мариа Роза Сервера (Maria Rosa Cervera) спроектировали башню-город по аналогии с кипарисом. Дом в 300 этажей и высотой 1228 метров для ста тысяч человек (рис. 1.46).
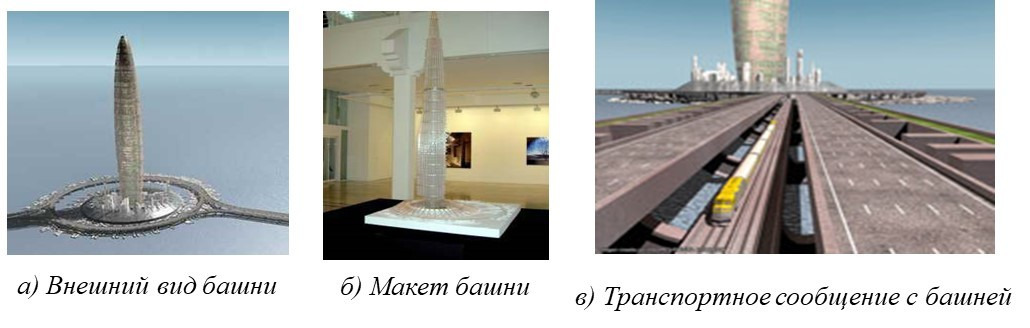
Вот, что говорит Хавьер Пиоз: «Наша башня не небоскреб. Не закрытое со всех сторон здание, как нынешние, стенами, а, по сути, открытое, в ажурной оболочке из множества стальных и алюминиевых элементов-мембран и стекол под разными углами крепления. Воздух и свет легко проникают во внутренние строения башни. Сама она — в форме вытянутого эллипса, диаметр самой широкой его части — 166 на 133 метра. Нет и этажей в нашем понимании, потому что тысяча метров высоты — это не 10 стометровых зданий, поставленных друг на друга. Такое ни один фундамент не выдержит, а сила ветра и малейшее землетрясение опрокинут его.
Бионика подсказала нам, что и как надо делать. Механизм роста, точнее, набора высоты, мы позаимствовали у деревьев. У кипариса в первую очередь (рис. 1.47). Его зеленая часть состоит из мелких чешуйчатых мембран, сквозь которые проходит ветер любой силы, а он и не шелохнется. Его корневая система заглублена всего на 50 сантиметров, но невероятно разветвлена и по своему строению напоминает губку. С каждым новым сантиметром ствола появляется, уходя чуть в сторону от уже существующего, новый отросток корня.

Попробуйте сбить или выкорчевать кипарис — потребуются невероятные усилия (рис. 1.48).

Вовсе не обязательно тянуть всю башню сразу. Можно, и даже лучше, поэтапно.
Завершили один квартал — и заселили. А стройка по предложенной нами технологии продолжается, ничуть не беспокоя людей. Всего же в башне будет 12 вертикальных кварталов, в среднем по 80 метров высоты каждый, а между ними — перекрытия-сдержки, которые станут своеобразной несущей конструкцией для каждого очередного уровневого квартала. Дома в нем, естественно, разновысокие, окруженные вертикальными садами, и люди будут по нему передвигаться с полным ощущением внешнего пространства благодаря свету и воздуху. Для быстрого передвижения с одного уровня на другой и внутри каждого уровневого квартала потребуется 368 вертикальных и горизонтальных лифтов. Но никаких лифтовых шахт не будет: их заменят легкие алюминиевые тубы.
В башне-городе свыше 2 миллионов квадратных метров полезной площади. Половину, исходя из расчетов, экономически целесообразно из-за быстрой окупаемости сдать под отели. Четверть — под офисы и квартиры. Оставшиеся 25 процентов потребуются под обслуживающие и технические помещения, поликлиники, магазины, учреждения культуры, рестораны и т. д. Посреди каждого квартала построим искусственное озеро, а дома — двух типов: на внешнюю и внутреннюю стороны.
Башня не окажется эдаким гигантским металлическим «деревом» посреди привычных железобетонных зданий. Мы вообще считаем, что наилучшее место для нее — на берегу моря или на искусственно намытом острове. Потому что по окружности ее должен «кольцевать» целый комплекс строений диаметром с километр с зонами технологического, торгового и социального назначения, обеспечивающими нормальную жизнь человека в башне. Там же место и транспортным узлам, соединяющим между собой шоссейные, железную и подвесную дороги, которые свяжут наш город с традиционным городом, аэро- и морским портами».
Внутреннее строение города-башни показано на рис. 1.49.
Бесплатный фрагмент закончился.
Купите книгу, чтобы продолжить чтение.