
Бесплатный фрагмент - Avtomatlashtirishning texnik vositalari
O’quv qo’llanma
O«quv qo‘llanma 5311000 — «Texnologik jarayonlar va ishlab chiqarishni avtomatlashtirish va boshqarish» (tarmoqlar bo‘yicha) ta’lim yo‘nalishi bo‘yicha bakalavrlarni tayyorlash o‘quv rejasidagi «Avtomatlashtirishning texnik vositalari» o‘quv fanidan adabiyot sifatida tayyorlangan.
O«quv qo‘llanmada avtomatashtirishning barcha texnik vositalarini fan doirasida ochib berilgan. Texnik vositalarni yoritishda qurilmalarni avtomatlashtirish tizimlaridagi joylashish ketma-ketligiga moslashga harakat qilingan. Birinchi navbatda avtomatlashtirishning umumiy masalalari berilib, navbatda sensorlar, ma’lumotlarni qabul qilish va qayta ishlash vositalari, ijro mexanizmlari keltirilgan. Nihoyada zamonaviy avtomatlashtirilgan tizimlarda tarmoqlar va elektron qurilmalarni mexanik, elektromagnit ta’sirlardan himoyalash masalasi yoritilgan.
Avtomatlashtirishning umumiy masalalari 1.2,3 — bo‘limlarda, 3—7 — bo‘limlarda avtomatlashtirishning sensor qurilmalari, 8—16 — bo‘limlarda ma’lumotlarni qabul qilish va qayta ishlash vositalari, 17- bo‘limda ijro mexanizmlari, 18- bo‘limda, elektron qurilmalarni mexanik, elektromagnit ta’sirlardan himoyalash keltirilgan.
O«quv qo‘llanma «texnologik jarayonlarni avtomatlashtirish» sohasidagi bakalavrlar, magistrlar va shu sohada avtomatlashtirish tizimini loyihalash bilan shug‘ullanadigan muhandislar uchun mo‘ljallangan.
Аннотация
Учебное пособия подготовлена для бакалавров по направлению образования «5311000-Автоматизация и управление технологическими процессами и производствами» (по отраслям) как литература, по предмету в учебном плане «Технические средства автоматизации».
В учебном пособие все технические средства автоматизации раскрыты в рамках предмета. В освещении материалов устройств технических средств, предпринята попытка размещение по последовательностью подключения устройств в системах автоматизаци. В первую очередь представлены общие вопросы автоматизации, затем представлены датчики, средства приема и обработки данных, исполнительные механизмы. Наконец, освещен вопрос защиты сетей и электронных устройств от механических и электромагнитных воздействий в современных автоматизированных системах.
Общие вопросы автоматизации в разделе 1.2,3, сенсорные устройства автоматики в разделах 3—7, средства приема и обработки данных в разделах 8—16, исполнительные механизмы в разделе 17, 18 — разделе представлена защита электронных устройств от механических и электромагнитных воздействий.
Учебное пособия предназначена для бакалавров, магистров по направлению «Автоматизация технологических процессов» и инженеров, занимающихся проектированием систем автоматизации в этой области.
Annotation
The textbook has been prepared for bachelors in the direction of education «5311000-Automation and control of technological processes and production» (networks) as literature, on the subject in the curriculum «Technical means of automation».
In the tutorial, all technical means of automation are disclosed within the scope of the subject. In the coverage of materials of devices of technical means, an attempt was made to place the devices in the automation systems according to the sequence of connection. First of all, general issues of automation are presented, then sensors, means of receiving and processing data, and actuators are presented. Finally, the issue of protecting networks and electronic devices from mechanical and electromagnetic influences in modern automated systems is highlighted.
General issues of automation in section 1.2.3, touch devices of automation in sections 3—7, means of receiving and processing data in sections 8—16, actuators in section 17, 18 — the section presents the protection of electronic devices from mechanical and electromagnetic influences.
The textbook is intended for bachelors, masters in the direction of «Automation of technological processes» and engineers involved in the design of automation systems in this area.
Kirish
Sanoatni rivojlantirishni zamon darajasiga yetkazishga texnologik tizimini energiya tejamkor zamonaviy tizimlar bilan modernizatsiyalash bilan erishish mumkin. Zamonaviy texnologik boshqarish tizimlarni asosini avtomatika, avtomatlashtirish vositalari tashkil etadi.
Texnik vositalar avtomatlashtirish va boshqarish tizimlarining real erishishi mumkin bo‘lgan holatlarni aniqlaydi va belgilaydi. Boshqarish tizimlarining funksional imkoniyatlariga talablarning ortib borishi sensorlar, kontrollerlar, bajarish qurilmalarilarining yangi avlodlarini ishlab chiqish va ishlab chiqarishni texnologiyalarini rivojlantiradi. Texnikani rivojlantirishning zamonaviy tendensiyalari asoslari integratsiyalashgan mikroprotsessorli qurilmalarga asoslangan «aqlli» avtomatlashtirish qurilmalarining keng joriy etilishida namoyon bo‘lmoqda. Masalan, sensorlarning sifat ko‘rsatkichlarini yaxshilash asosan o‘rnatilgan mikroprotsessorlarning imkoniyatlari va ularni dasturlash darajasi bilan belgilanadi. Mikroprotsessor qurilmalarini aniq local tarmoqqa birlashtirish, tarmoq ma’lum bir ishlab chiqarish talablariga moslashish qobilyatini ta’minlaydigan, taqsimlangan boshqaruvga ega, prinspial jihatdan yangi tizimlarning paydo bo‘lishiga yordam beradi. Zaruriy tashqi qurilmalardan foydalanish nazorat-boshqarish, ma’lumotlarni yig‘ish tizimlarida yuqori funksiyalarga ega, boshqaruv esa «robotik» texnik tizimlarning paydo bo‘lishiga olib keldi.
Hozirda zaruruiy obyekt uchun individual funksiyalarini birlashtirish odatiy hol bo‘lib qolmoqda. Raqamli signal protsessorlari, dasturlashtiriladigan mantiqiy integral mikrosxemalar, ko‘p protsessorli modullar va masofaviy signal kiritish-chiqarish modullari asosida qurilgan yagona qurilmalarda axborotni oraliq qayta ishlash va transformatsiya qilishda qo‘llanilmoqda. Yangi texnologiyalarning rivojlanishi natijasida turli protsessorli platalar, bitta platali kompyuterlar keng ishlab chiqilmoqda. Ularni aksariyati texnologiyasi personal kompyuterga mos keladigan kompyuterning ochiq arxitekturasiga to‘liq muvofiqligidir.
Hozirda RS-482/485, CAN, AS va boshqa interfeysli kodlangan signallarni uzatish uchun ketma-ket protokollar asosida tarmoq ma’lumotlarini yig‘ish va qayta ishlashning yuqori tezlikdagi texnik vositalari ishlab chiqilmoqda. Boshqarish, ularning ishlashi ishonchliligi, texnik qurilmalarning ishonchliligini oshishi bilan uzviy bog‘liqdir. Boshqaruv tizimining holatini diagnostika qilish va qayd etishning majburiy funksiyalari, ma’lumotlarni uzatish kanallarining ortiqchaligi, qurilmalar o‘rtasida axborotni qayta ishlash funksiyalarini taqsimlash uchun vositalarini yaratish masalasi birinchi o‘ringa chiqmoqda.
Ushbu o‘quv qo‘llanmada boshqaruv tizimlarining asosiy, zamonaviy tipik texnik vositalarini texnologiyalari va qo‘llash xususiyatlari ko‘rib chiqilgan.
Sensorlar, bajarish qurilmalarilari va dasturlashtiriladigan mantiqiy kontrollerlar, shuningdek ularni ulash usullari yetarlicha batafsil ko‘rib chiqilgan. Sanoat tarmoqlari standartlariga katta e’tibor berilgan.
Avtomatlashtirishning texnik vositalari an’anaviy masalalarini ko‘rib chiqqan holda, muallif sohada asosiy o‘rin egallagan Siemens, Honeywell va boshqalar tomonidan ishlab chiqarilgan zamonaviy texnik qurilmalarning texnik ma’lumotlarini taqdim etishga harakat qildi. Shuningdek, Uzbekiston avtomatlashtirish bozorida faol qo‘llanilayotgan qurilmalar analoglari ham taqdim etilgan.
Qo‘llanma materiallarini tayyorlashda Prosoft, Rakurs, PLC-Systems va boshqa shu kabi kompaniyalar ishlari, darsliklar, ma’lumotnomalar, monografiyalar, jurnal maqolalari, shuningdek, axborot va tijorat internet saytlari materiallaridan foydalanilgan. Tavsiya etilgan adabiyotlar va sanoatni avtomatlashtirish masalalari bo‘yicha saytlar ro‘yxati qo‘lyozma oxirida keltirilgan. Ushbu materiallar fanni o‘zlashtirish, kurs ishlari va bitiruv loyiha ishlarini bajarishda foydali bo‘lishi mumkin.
I BOB. AVTOMATLASHTIRISHGA TIZIMLI YONDASHISHDA TEXNIK VOSITALAR VA NAZORAT QURILMALAR
I BOB. AVTOMATLASHTIRISHGA TIZIMLI YONDASHISHDA TEXNIK VOSITALAR VA NAZORAT QURILMALAR
Tizimli yondashuv an’anaviy yondashuvdan yaxlitning o‘z qismlariga ega bo‘lmagan sifatlarga ega ekanligi haqidagi taxmindan farq qiladi. Elementlarni birlashtirish maqsadi butun va uning qismlari o‘rtasidagi bu bog‘liqlik tizimning ta’rifini beradi — bu o‘zaro bog‘langan qismlarning yig‘indisidir.
Avtomatlashtirish tarkibiga kiruvchi qurilma tizimga kiradigan va har bir alohida elementda mavjud bo‘lmagan zarur funksiyalarni bajarishda shunday xususiyatlar va qobiliyatlarni oladi:
— mavjud elektr motori (oddiy aylanish);
— mavjud dasturlashtiriladigan kontroller (axborotni qayta ishlash).
Sanab o‘tilganlarni birlashtirilish dasturlashtiriladigan elektr yuritma (chastotali o‘zgartirgich) yaratilishiga olib keladi.
Loyihaga tizimli yondashuv tizimning alohida qismlari o‘rtasidagi tizim aloqalarini hisobga olishni nazarda tutadi, tizim tuzilishini aniqlash, kuzatishlarni qayd etish, atributlarni aniqlash va tashqi muhit ta’sirini tahlil qilishni o‘z ichiga oladi. Tizim aloqalari tizim tarkibiy qismlarining sifat va miqdoriy xususiyatlariga ma’lum cheklovlar qo‘yadi.
Loyihalashda muhandisning vazifasi yechim usuliga qo‘yilgan ma’lum cheklovlar ostida, yechim natijasiga qo‘yilgan ma’lum cheklovlar ostida vazifaning optimal bajarilishini ta’minlaydigan tizimni ishlab chiqishdir.
Loyihalashda quyidagi cheklovlar mavjud:
— bilim bilan;
— belgilangan muddatlarda;
— uskunalar bo‘yicha;
— kompyuter texnologiyalari bo‘yicha;
— moddiy xarajatlar uchun;
— ishonchlilik nuqtayi nazaridan;
— texnologik;
— ma’muriy va boshqalar.
1.1. Avtomatlashtirish va boshqarishning texnik vositalari
Cheklovlar ro‘yxatini bilish va konkretlashtirish optimal loyihani yo‘lini belgilash, asossiz xarajatlardan qochish, loyiha vazifalarini amalga oshirish uchun zarur vositalarni tanlashni asoslash imkonini beradi. Shuning uchun loyihaning zaruriy qismi loyiha obyektining o‘ziga xos xususiyatlarini tahlil qilish bo‘limidir. Ishlab chiqarishni boshqarish tizimlari uchun texnologik boshqaruv obyekti (TBO) uchun o‘ziga xos xususiyatlarni va natijada cheklovlarni tahlil qilish kerak. Xususan, kurs va diplom loyihalarida texnik nazoratni tanlash uchun cheklovlar ro‘yxatini ko‘rsatish bilan TBO ni tegishli tahlil qilish kerak.
Muhandislik loyihalash jarayonining bosqichlari:
1) maqsadni aniqlash va vazifani belgilash;
2) cheklovlarni belgilash, yechim tanlash, rejani ishlab chiqish;
3) yechim usulini shakllantirish;
4) yechim usulini tahlil qilish;
5) qarorlarni konkretlashtirish.
Yechimlarni shakllantirish, tahlil qilish va konkretlashtirish bosqichlarida loyihalashtirilgan avtomatlashtirish va boshqarish tizimini (ABT) yaratish uchun tegishli texnik vositalarni tanlash kerak bo‘ladi.
Avtomatlashtirish va boshqarishning texnik vositalari (ABT TV) da quyidagi vazifalarni hal qilish uchun qo‘llaniladi:
— jarayon holati to‘g‘risidagi ma’lumotlarni yig‘ish va qayta ishlash;
— aloqa kanallari orqali axborot uzatish;
— axborotni o‘zgartirish, qayta ishlash va saqlash;
— boshqaruv guruhlarini shakllantirish;
— jarayonga ta’sir qilish uchun qurilmadan foydalanish va ta’minlash (jarayonga ta’sir qilish uchun energiya, mexanika, fizik ta’sir vositalaridan foydalanish);
— operatorga ma’lumot berish.
Tuzilgan muammolarni hal qilishni ta’minlaydigan asosiy texnik vositalarning sinflarini sanab o‘tamiz:
— ABT kirishidagi vositalar — sensorlar;
— ABT chiqishidagi vositalar — chiqish konvertorlari, bajarish qurilmalari;
— ichki ABT qurilmalari — boshqaruv bloklari, kuzatuvchilar (ular qo‘shimcha ma’lumotlarni hisoblab chiqadi yoki nazorat harakatlarini shakllantiradi);
— yordamchi qurilmalar — texnik hujjatlar, vizualizatsiya va ogohlantirish uskunalari.
Texnik vositalarni tanlashning spesifikatsiyasi tizimning narxini va texnik xususiyatlarini optimallashtirish muammosi bilan uzviy bog‘liqdir.
Muayyan ABTni tanlash uchun optimallashtirish vazifalari:
— tannarx bo‘yicha;
— sifati bo‘yicha;
— ishonchlilik nuqtayi nazaridan
Nazorat savollari
1. Avtomatlashtirishdan maqsad nima?
2. Avtomatlashtirish vositalari nima uchun kerak?
3. Avtomatlashtirishni loyihalashda qanday cheklovlar mavjud?
4. Avtomatlashgan tizimlarda kirishni qanday vositalar tashkil etadi?
5. Avtomatlashgan tizimlarda chiqishni qanday vositalar tashkil etadi?
1.2. TJ ABT loyihalash bosqichlari
1. Texnik topshiriq (mijoz emas, loyihachi tomonidan tuzilgan).
2. Amalga oshirish bosqichlari:
2.1. strukturaviy-algoritmik qismni loyihalash;
2.2. texnik vositalarga texnik talablarni ishlab chiqish;
2.3. ABT uchun texnik yordamni loyihalash;
2.4. ABT komponentlarini joylashtirish va ulash rejalarini ishlab chiqish;
2.5. texnik va ishchi hujjatlarni tayyorlash.
3. Buyurtmachining texnik maslahati bo‘yicha loyihani himoya qilish.
Murakkab vazifani loyihalashda uni oddiy kichik vazifalarga bo‘lish kerak, ularning yechimini tipik tuzilmalar darajasida topish mumkin.
Strukturaviy-algoritmik qismni loyihalashda tizimning ishlashini umumiy algoritmi ishlab chiqiladi, axborot oqimlarining tarkibi va tuzilishi aniqlanadi.
Ma’lumki, texnik va texnologik obyektlarni avtomatik boshqarish tizimlarini loyihalashning asosiy tushunchasi quyidagicha: Boshqarish obyektining matematik modeli va ushbu obyekt uchun boshqaruv tizimining optimal ishlashi mezonini belgilash.
Barcha cheklovlar e’tiborga olgan holda, boshqaruv moslamasining ishlash algoritmini aniqlash va barcha talablar bajarilishi uchun uning texnik bajarilishini amalga oshirish talab etiladi.
Murakkab texnologik obyektlarni boshqarish tizimlari uchun, shuningdek, tizimning axborot tuzilishini, ya’ni obyektning menejer bilan qo‘shimcha aloqa kanallarini soni va joylashishini aniqlash kerak, chunki bunday tizimlar odatda ko‘p tizimli va buzilish kompensatsiyasi bilan qurilgan. Tabiiyki, tizimning axborot strukturasini tanlash obyektning matematik modeliga ham ta’sir qiladi. Yetarli darajada yaxshi natija olish imkoniyatiga bir qator cheklovlar mavjud.
Boshqaruv tizimining texnik loyihasini amalga oshirishdan oldin boshqaruv obyektining modellari ishlab chiqishda cheklovlarni hisobga olish zarur, ushbu cheklovlar ham tashkiliy, ham asosiy sabablarga bog‘liq.
Tashkiliy tartibning eng muhim cheklovlaridan biri asosiy texnologik asbob-uskunalarni ishga tushirish bilan bir vaqtda boshqaruv tizimini ishga tushirishning mavjud amaliyotini hisobga olish kerak. Bu texnologik uskunalar uchun loyiha bilan deyarli bir vaqtning o‘zida boshqaruv tizimini ishlab chiqarish uchun loyiha hujjatlarini berishni talab qiladi.
Boshqaruv tizimini loyihalash boshlanishiga kelib, haqiqiy obyekt hali ham aniq emas va shuning uchun uning matematik modelini eksperimental ravishda olish imkoniyati yo‘q. Modellarni hisoblash yo‘li bilan olish juda ko‘p soddalashtirilgan taxminlarni kiritish bilan bog‘liq bo‘lib, ularning haqiqiyligini taqqoslash uchun standart yo‘qligi sababli tekshirish mumkin emas.
Loyihalash bosqichidan oldin olingan boshqaruv obyektlari modellarining aniqligi bo‘yicha fundamental cheklovlar obyektning matematik modelini yaratish vazifasining tizimli yechishga bog‘liq.
Ierarxiya va yaxlitlik. Gap model strukturasini tanlash va uni real obyektga yaqinlashtirish mezonlari haqida bormoqda.
Bu tanlov nafaqat obyektning xususiyatlari bilan belgilanadi, balki butun boshqaruv tizimining optimal ishlashi mezonini tanlashga va natijada ishlash algoritmiga bog‘liq.
Uning nazorat qismi. Tizimli paradoks yuzaga keladi: obyekt modelini olish uchun boshqaruv moslamasining ishlash algoritmini bilish, aslida qaysi obyekt modeli kerakligini topish kerak. Ushbu paradoksni hisobga olmaslik, obyekt modeliga muvofiq ishlab chiqilgan optimal boshqaruv tizimi, uni haqiqiy obyektda amalga oshirilgandan so‘ng, nafaqat optimal bo‘lmagan, balki hattoki bo‘lib chiqishiga olib kelishi mumkin.
Beqarorlik. Shu munosabat bilan, tahlil shuni ko‘rsatadiki, o‘rtacha ildiz yoki integral kvadratning minimal mezonlari bo‘yicha, ya’ni ustun qo‘llanilgan mezonlarga ko‘ra qurilgan obyekt modellari ayniqsa muhim bo‘lishi mumkin.
Xavflilik. Ushbu paradoksdan, shuningdek, tizimli fikrlashning har qanday paradoksdan chiqish yo‘li, ma’lum bo‘lgan dastlabki ma’lumotlarga asoslanib, ketma-ket yaqinlashish (iteratsiya) usulidan foydalanishdir.
Obyekt modeli haqida to‘liq bo‘lmagan ma’lumotlar, uni boshqarish algoritmini optimallashtirish bilan bir vaqtning o‘zida asta-sekin to‘ldiriladi. Bunday takrorlanadigan «identifikatsiyalash-optimallashtirish» protsedurasini tashkil etish boshqaruv tizimini ishga tushirish bosqichini ham o‘z ichiga olishi kerak.
Jarayonni boshqarish tizimlarini ishlab chiqishda hal qilingan vazifalarni alohida bosqichlar o‘rtasida optimal qayta taqsimlash kerak.
1. Texnik topshiriqlarni, texnik va ishchi loyihani shakllantirish bosqichida boshqaruv tizimining axborot tuzilmalarining mumkin bo‘lgan variantlari ko‘rsatilgan va har bir variantni amalga oshirish uchun yetarli bo‘lgan axborot-texnik ta’minot aniqlanadi. Bu yerda boshqaruv algoritmlarini umumiy shaklda shakllantirishga ruxsat beriladi; sozlash parametrlarining raqamli qiymatlari juda katta darajada yaqinlashish bilan baholanishi mumkin. Loyiha, boshqaruv algoritmlari va ushbu algoritmlarni amalga oshiradigan texnik vositalardan tashqari, loyihaning ajralmas qismi sifatida «identifikatsiyalash-optimallashtirish» vositalarini o‘z ichiga olishi kerak.
Tizimni ishga tushirish bosqichida, shuningdek tizimni takomillashtirish maqsadida obyektni keyingi ekspluatatsiya qilish jarayonida sinashlar olib boriladi.
2. Tizimni ishga tushirish (amalga oshirish) bosqichida tizimda mavjud texnik vositalar va dasturlar yordamida qabul qilingan yechimlar optimallashtiriladi va eng yaxshisi tanlanadi.
Nazorat savollari
1. Loyihalashning qanday bosqichlari mavjud?
2. Texnik topshiriq nima?
3. Algoritm qanday tuziladi?
4. Jarayon modeli nima?
5. Tizimni topshirig‘ini qanday shakllantiriladi?
1.3. Boshqaruv tizimlarining texnik vositalarini loyihalashda tizimli yondashuv
1. Tizimning ishlashini tahlil qilish bosqichida tizimni har tomonlama o‘rganish quyidagi maqsadlarda amalga oshiriladi:
a) obyektga nisbatan belgilash usullarini tanlash va uni amalga oshirish bo‘yicha operatsion xodimlarga tavsiyalar berish;
b) tizimni mumkin bo‘lgan takomillashtirish yo‘llarini aniqlash.
Tuzilgan loyiha konsepsiyasi dasturlashtiriladigan kontrollerlar asosida qurilgan boshqaruv tizimlarida to‘liq qo‘llanilishi mumkin, chunki bunday tizimlarda to‘g‘ridan-to‘g‘ri operatsion tizimni ishga tushirish jarayonida algoritmlar va boshqaruv tuzilmalarida qiyinchiliklarsiz amalga oshirish mumkin.
Texnik ta’minotni loyihalash natijasi hal etilayotgan muammoning o‘ziga xos xususiyatlari bilan belgilanadigan texnik talablarni hisobga olgan holda lokal avtomatlashtirish tizimlarini, blok-sxemalarini va o‘lchash va nazorat qilish kompyuter kompleksining tarkibini ishlab chiqishdir.
Texnik talablarning quyidagi sinflari mavjud:
a) asosiylari — unumdorlik, ishonchlilik, atrof-muhit sharoitlariga qarshilik, tashqi ta’sirga chidamlilik, birlashtirilgan bloklardan foydalanish;
b) yordamchi — elementar va konstruktiv asos jihatidan alohida texnik vositalarning mosligi;
v) iqtisodiy — kapital sarflar va barcha jihozlarni ishlatish uchun minimal xarajatlarga erishish. Bu avvalgi barcha bo‘limlarda hisobga olinishi kerak.
Masalan, texnik hisoblash vositalari quyidagi funksiyailarning sifati bilan baholanadi:
— kiruvchi ma’lumotlarni qayta ishlash;
— xodimlar uchun kerakli ma’lumotlarni chiqarish;
— yuqori sathga ma’lumotlarni uzatish;
— xodimlarni nazorat qilishning tashkiliy tizimlarini yaratish;
— kirish va chiqish parametrlarini aniqlash, boshqarish harakatlari.
Bundan tashqari, tizimda ishlatiladigan hisoblash vositalari uchun ish rejimini tanlash muhim:
— real vaqt (tashqi so‘rovga javob boshqariladigan jarayonning tezligi bilan belgilanadigan minimal vaqt oralig‘ida amalga oshiriladi);
— boshqarish davrlari bo‘yicha yoki muvofiqlashtirish (boshqaruv siklik takrorlanadigan buyruqlar guruhlarini o‘z ichiga oladi, masalan, dastur boshqaruviga ega mashinalar).
Ko‘pgina loyihalarni tizimli tahlil qilish va ularni keyinchalik amalga oshirish loyihalash bosqichida ham, tizimning keyingi «foydalanish"da ham umumlashtirilgan xarajatlar va umumlashtirilgan loyiha samaradorligi o‘rtasidagi umumiy muhim natijani aniqlash imkonini berdi.
Loyihani, loyihalash jarayoni va loyihani amalga oshirish samaradorligining xarajatlarga umumiy bog‘liqligi grafikda ko‘rsatilgan (1.1-rasm).
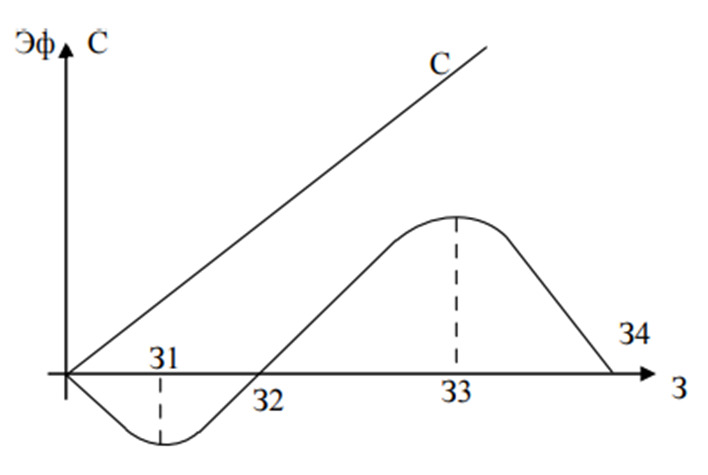
Grafik tahlilidan ko‘rinib turibdiki, loyihaning samaradorligi
juda kam xarajat bilan ham, juda ko‘p xarajat bilan ham past bo‘lishi mumkin.
З1 — juda kam xarajat, salbiy samaradorlik;
З2 — xarajatlarni oshirish kerak, samaradorlik nolga teng;
З3 — eng yaxshi kombinatsiya; bunday xarajatlar bilan biz maksimal samaradorlik darajasiga erishamiz;
З4 — juda ko‘p xarajatlar mablag‘larning isrof qilinishiga, samaradorlikning pasayishiga olib keladi.
Loyihachining tizimli yondashuvi, tajribasi va bilimi loyihalashtirilgan tizimdagi muhim ulanishlarning eng ko‘p sonini va ular tomonidan yuzaga keladigan cheklovlarni hisobga olgan holda eng yuqori samaradorlik darajasiga yaqinlashishga yordam beradi. Samaradorlikni baholashda tahlil, ekspert baholashlari, to‘g‘ridan-to‘g‘ri hisob-kitoblar, matematik modellashtirish usullaridan foydalanishi mumkin.
Samaradorlik prinsipidan foydalanib, tizimni loyihalashning asosiy usulini shakllantirish mumkin: yagona tizim funksional xususiyatga ko‘ra qismlarga bo‘linadi, ushbu qismlarni amalga oshirishning mumkin bo‘lgan variantlari, ular o‘rtasidagi aloqalar o‘rnatiladi va berilgan bo‘yicha variantlar to‘plami, talablarga javob beradigan tizim tuzilishi tanlanadi.
Maksimal kutilgan samaradorlik uchun boshqaruv tizimlarining texnik vositalarini loyihalashda tizimli yondashuv ahamiyati katta. Avtomatlashtirish va boshqarish tizimlarining texnik vositalarini tanlash vazifasi bilan bog‘liq holda, ushbu vositalarning mutanosibligi va yetarliligi tamoyillariga amal qilish muhimdir. Foydalanish shartlari va ruxsat etilgan Xarajatlar bo‘yicha belgilangan cheklovlarni hisobga olgan holda vazifani bajarish kerak.
Nazorat savollari
1. Avtomatlashtirilgan tizimlarni boshqarish tizimi qanday shakllantiriladi?
2. Boshqarish tizimi qanday qurilmalardan iborat?
3. Avtomatlashtirilgan tizimlarni samaradorligi nimalardan iborat?
4. Samaradorlik bilan sarf qanday bog‘langan?
II BOB. AVTOMATIK BOSHQARUV TUZILMALARI STRUKTURASI
2.1. ABT ning maqsadi, funksiyalari va vazifalari
Boshqarish bu — obyektning holati to‘g‘risidagi ma’lumotlarga asoslangan, faoliyat ko‘rsatish maqsadiga muvofiq obyektning ishlashini saqlash yoki yaxshilashga qaratilgan harakatlar majmuini tanlashdir.
ABT texnologik boshqaruv obyektida boshqaruv harakatlarini ishlab chiqish va amalga oshirish uchun mo‘ljallangan. ABT faoliyatining maqsadi texnologik jarayonni bir qator aniq mezonlar bo‘yicha optimallashtirishdir.
ABT funksiyalarining uchta asosiy sinfi mavjud.
Boshqarish funksiyalari:
— texnologik o‘zgaruvchilarni og‘ish orqali tartibga solish (teskari aloqa bilan tizimlar tomonidan amalga oshiriladi);
— uskunalar guruhini mantiqiy boshqarish;
— optimal boshqarish (boshqaruv obyekti jarayonlari parametrlari bo‘yicha belgilangan maqsad funksiyasining ekstremumiga erishish uchun amalga oshiriladi);
— adaptiv boshqaruv (texnologik jarayon parametrlari o‘zgarganda avtomatik boshqaruv tizimining parametrlari o‘zgaradi).
Axborot funksiyalari:
— axborotni to‘plash, qayta ishlash va uzatish;
— texnologik parametrlarni markazlashtirilgan nazorat qilish va o‘lchash;
— jarayon parametrlarini (holat o‘zgaruvchilari va boshqalar) bilvosita o‘lchash (hisoblash);
— operativ xodimlarga ma’lumotlarni shakllantirish va berish;
— tegishli boshqaruv tizimlariga ma’lumotlarni tayyorlash va uzatish.
Ikkilamchi funksiyalar:
— ABT apparat va dasturiy ta’minotiga texnik xizmat ko‘rsatish va nazorat qilish
Nazorat savollari
1. Avtomatlashtirishning maqsadi nimada?
2. Avtomatlashtirishning funksiyalarini sanab o‘ting.
3. Avtomatlashtirishning axborot funksiyalari nimada?
4. Axborot funksiyalarini sanab bering.
2.2. ABT sinflari
ABT quyidagi sinflarga bo‘linadi:
— Lokal boshqaruv tizimlari;
— markazlashtirilgan boshqaruv tizimlari;
— taqsimlangan boshqaruv tizimlari.
Barcha murakkab tizimlarning ajralmas qismi bo‘lgan eng oddiy tuzilma (2.1-rasm) teskari aloqaga ega bo‘lgan avtomatik lokal boshqaruvchi (masalan, turbinaning tezligini boshqaruvchi).
Sensor tomonidan aylantirilgan obyekt haqidagi chiqish ma’lumotlari taqqoslash elementiga beriladi. Belgilangan nuqtadan va sensor chiqishidagi signallar o‘rtasidagi farq boshqaruv xatosi signalini hosil qiladi, unga ko‘ra boshqaruv bloki ishlaydi va obyektga boshqaruv signalini hosil qiladi.
Nazorat maqsadi: belgilangan funksiyaning samaradorligini oshirish uchun obyektning ishlashini tartibga solish uchun minimal xato va maksimal tezlik bilan erishish. Maqsadga lokal regulator yordamida erishiladi. Ko‘pincha, lokal boshqaruvchining yagona konstruktsiyasida nazorat qilish maqsadida signallarni qabul qilish, uzatish va o‘zgartirishning barcha funksiyalarini bajarish vositalari birlashtirilgan.
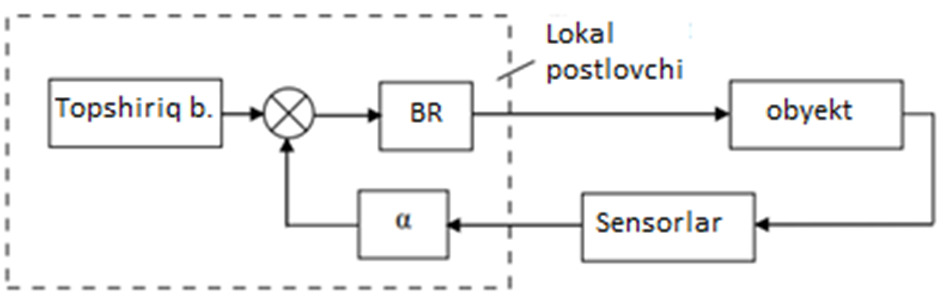
Boshqarishda ishonchlilik hali ham asosiy boshqaruv tizimlarida «muhim chegara» sifatida e’tiborga olinadi. Lokal ABT sxemasi yuqorida keltirilgan (2.2-rasm).
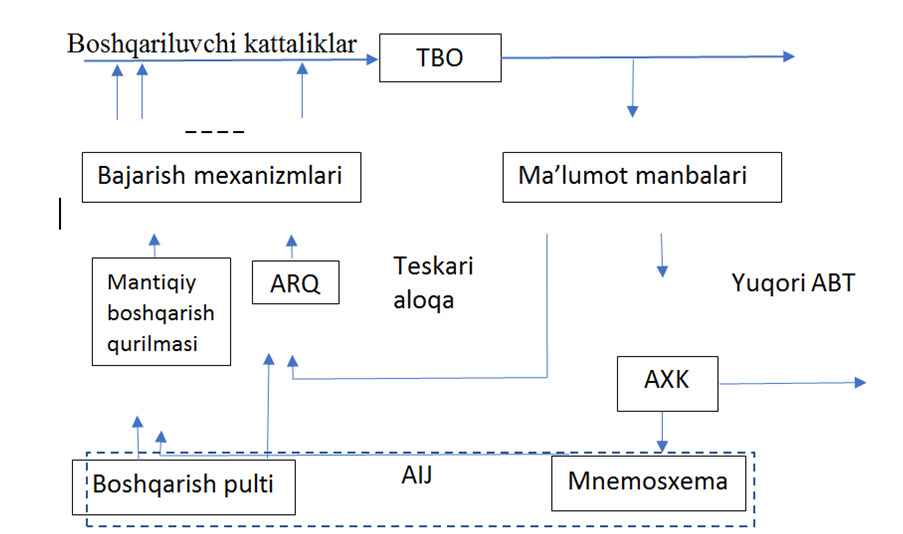
Lokal ABT ning blok sxemasi rasmda ko‘rsatilgandek (2.2. rasm) berk bo‘lgan elementlar yig‘indisidan iborat rostlash qurilmasiga ega klassik tizimdir. Sxemada nuqtali o‘qlar qaror qabul qiluvchiga aloqa qurilmalari va qo‘lda boshqarish orqali to‘g‘ridan-to‘g‘ri ijro etuvchi qurilmaga harakat qilish imkonini beruvchi yo‘lni ko‘rsatadi. Zaryriy holatlarda qo‘lda boshqarish qo‘llaniladi:
— favqulodda vaziyatlarni hal qilish;
— boshqariladigan obyektda katta o‘zgarishlarga yo‘l qo‘ymaslik.
Bunday holda, qo‘lda boshqarish yuqori ishonchlilik koeffitsientiga ega bo‘lishini ta’minlaydi.
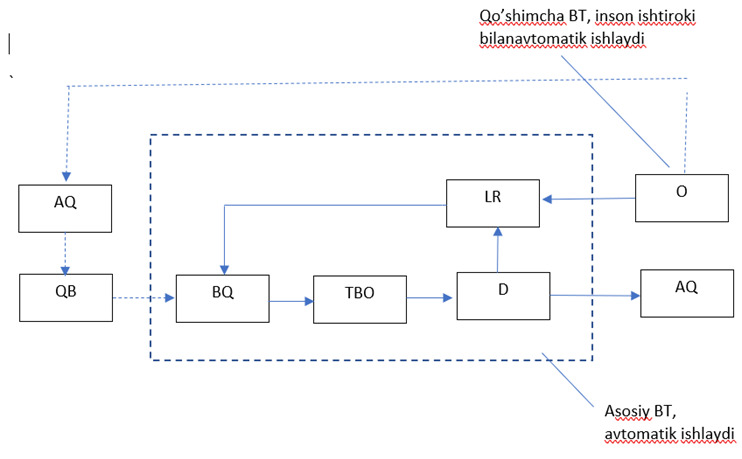
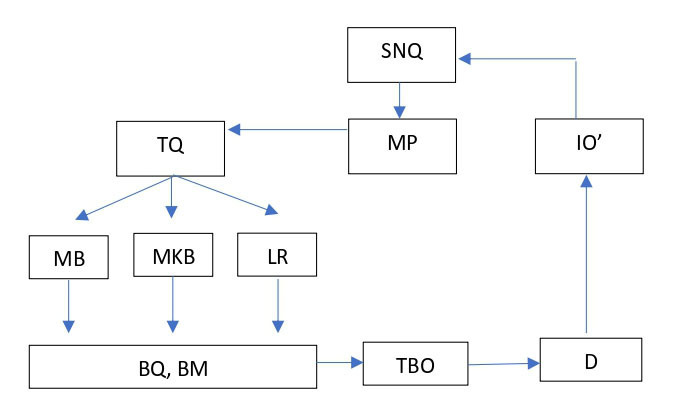
AQ- interfeys yoki aloqa qurilmasi (Ethernet, RS-485 interfeysi va boshqalar), QB- qo‘lda boshqarish, BQ- bajarish qurilmasi, TBO- texnologik boshqarish obyekti, D- datchik, LR- local rostlagich (kontroller), O- operator (texnolog). LR — lokal kontroller, odatda bir nechta kirish va chiqishlarga ega (sensorlar va sensorlarni normallashtirish, kompyuterdan ma’lumotlarni uzatish, belgilangan parametrni sozlash). U boshqarish tizimini asosiy elementi hisoblanadi.
Avtomatlashgan tizimlar sxemasini quyidagicha ifodalash mumkin:
2.2.1. Markazlashtirilgan ABT
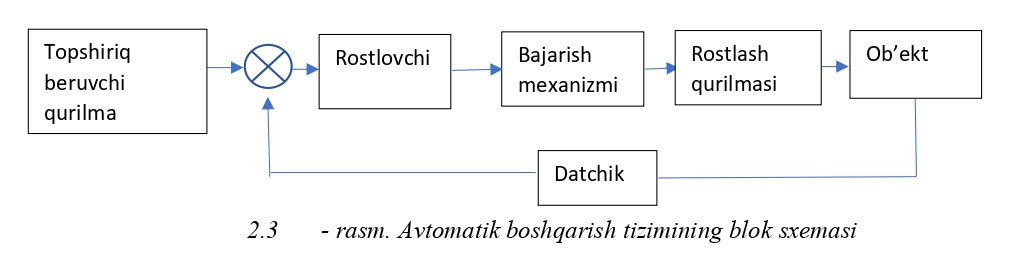
Markazlashtirilgan ABT bir kanalli (2.3-rasm) va ko‘p kanalli (2.4-rasm) bo‘lishi mumkin. Raqamlardagi ovallar ko‘p yadroli aloqa kanallarini ko‘rsatadi.
Markazlashtirilgan yagona kanal tizimi
Tizim shunday tuzilganki, barcha qarorlar datchiklar va bajarish qurilmalari bilan bitta aloqa kanali orqali ulangan yagona markaziy boshqaruv organi tomonidan qabul qilinadi. Bunday tuzilma tarihan rivojlangan bo‘lib, uning mafkurasi asosan qo‘l tizimlarini takrorlaydi, masofadan boshqarish pulti bilan. Boshqaruv obyekti va u bilan bog‘liq hal qilinishi kerak bo‘lgan muammolar murakkablashishi bilan aloqa kanali orqali axborot oqimi kuchayadi. Tizimning ma’lum darajada murakkabligidan boshlab, markaziy boshqaruvchining imkoniyatlari yetarli bo‘lmasligi mumkin. Bu esa tizimga ko‘p kanalli markazlashgan ko‘p kanalli texnologiyalarni qo‘llashga olib keladi.
Markazlashtirilgan ko‘p kanal tizimi
Ko‘p kanalli ABTda markaz to‘g‘ridan-to‘g‘ri ABT ishlashiga ta’sir qiluvchi ko‘plab texnologik zanjirlarning fikr-mulohazalarini nazorat qiladi. Kanal boshqaruvchisi ma’lumotni ko‘p qatorlarga ajratadi. Kanal kaliti ma’lumotni bir qatorga «hatlash» uchun ishlatiladi.
Ma’lumotni uzatish uchun ko‘plab kanallar mavjud bo‘lganda, natijada ko‘plab fizik ulanishlar mavjud. Biroq, simli liniyalar kabi ulanishlar soni bo‘yicha cheklovlar mavjud. Aloqa vositalariga texnik cheklovlar va kanallar soni bo‘yicha iqtisodiy cheklovlar mavjud.
Shuning uchun kanallarni multiplekslash qo‘llaniladi (vaqt yoki chastota bo‘yicha). Ko‘p kanalli ABT da ikkita ma’lumot oqimini ajratish mumkin: obyektdan va obyektga. Markaziy protsessor (CPU) butun tizimning markazidir. Biz protsessor to‘g‘ridan-to‘g‘ri nazorat qiladi, yoki obyektga ta’sir qiladigan impulslar ishiga halaqit beradi deb taxmin qilinadi.
Markazlashtirilgan ko‘p kanalli avtomatlashtirilgan tizimga quyidagini misol qilish mumkin:
Keltirilgan blok sxemada ko‘p kanalli makazlashgan boshqarish tizimi ifodalangan. Boshqarish bloki sifatida kompyuter foydalanilgan.
2.2.2. Taqsimlangan boshqarish tizimlari
Zamonaviy boshqarish tizimlarini asosiy qismlarini taqsimlangan boshqarish tizimlari tashkil etadi. Taqsimlangan boshqarish tizimlarida boshqarish obyektidagi boshqarish nuqtalari (boshqarish parametrlari) xarakteriga qarab taqsimlanib, turli boshqarish kontrollerlariga bog‘laniladi. Kontrollerlar yuqori boshqarish blokidan olingan «topshiriq» asosida o‘ziga bog‘langan texnologik parametrlarni nazorat qiladi va boshqaradi. Taqsimlangan boshqarish tizimiga quyidagi blok sxemani misol qilish mumkin:
1. Avtomatlashtirilgan tizimlar qanday bo‘limlardan iborat bo‘ladi?
2. Chiziqli boshqarish tizimlari qayerlarda qo‘llaniladi?
3. Lokal boshqarish tizimlari nima?
4. Markazlashgan boshqarish tizimlari nima?
5. Taqsimlangan tizimlarni tushuntiring.
6. Obyekt deganda nima tushuniladi?
2.3. Texnologik jarayonlarni avtomatlashtirilgan boshqarish tizimlari
TJ ABT ning maqsad va vazifalari:
Tizim faoliyatining aniq maqsadlarini aniqlash jarayonlarni boshqarishning avtomatlashtirilgan tizimini loyihalashning asosiy vazifasi hisoblanadi. Quyidagi maqsadlarni shakllantirish mumkin:
— yoqilg‘i, xomashyo, materiallarni tejash;
— TBO xavfsizligini ta’minlash;
— ishlab chiqarilgan mahsulot sifatini oshirish;
— ishlab chiqarish mehnati narxini pasaytirish;
— uskunaning optimal yuklanishiga erishish;
— TBO ish rejimlarini optimallashtirish.
TJ ABT funksiyalari ma’lum bir boshqaruv maqsadiga erishishga qaratilgan tizim harakatlarining to‘plamidir. Tizim harakatlari majmui deganda tizim qismlari tomonidan bajariladigan operatsiyalar va harakatlar ketma-ketligi tushuniladi.
TJ ABT funksiyalari quyidagi sinflarga bo‘linadi:
— menejer;
— informatsion;
— yordamchi.
Nazorat funksiyasining natijasi nazorat harakatlarini ishlab chiqish va amalga oshirishdir. Nazorat harakatlarini ishlab chiqish — mavjud ma’lumotlarga asoslanib, ulardan eng oqilonasini tanlashdir.
Amalga oshirish ishlab chiqilgan nazorat harakatlarini amalga oshirish bo‘yicha harakatlardan iborat. TJ ABT dagi «ishlab chiqish» va «amalga oshirish» tushunchalarining farqi ularni amalga oshiradigan sub’ektlarning (elektron kompyuter yoki operator) ajralishi bilan bog‘liq.
TJ ABT boshqaruvining asosiy funksiyalari:
— individual texnologik parametrlarni tartibga solish;
— texnologik operatsiyalar yoki agregatlarni bir davrli mantiqiy nazorat qilish;
— uskunalar guruhini dasturiy mantiqiy nazorat qilish;
— barqaror yoki vaqtinchalik texnologik rejimlarni yoki TJ ning alohida bosqichlarini optimal boshqarish;
— umuman obyektni moslashuvchan boshqarish.
Avtomatlashtirilgan jarayonni boshqarish tizimining axborot funksiyasining mazmuni ABO holati to‘g‘risidagi ma’lumotlarni to‘plash, qayta ishlash va tezkor xodimlarga taqdim etish yoki ushbu ma’lumotlarni keyingi qayta ishlash uchun uzatishdir. Asosiy axborot funksiyalari quyidagilarni o‘z ichiga oladi:
— texnologik parametrlarni markazlashtirilgan nazorat qilish va o‘lchash;
— jarayon parametrlarini (texnik va iqtisodiy ko‘rsatkichlar, ichki o‘zgaruvchilar va boshqalar) bilvosita o‘lchash (hisoblash);
— operativ xodimlarga ma’lumotlarni shakllantirish va berish;
— tegishli boshqaruv tizimlariga axborot tayyorlash va uzatish;
— ABO va uning jihozlari holatining umumlashtirilgan bahosi va prognozi.
Axborot va nazorat funksiyalari asosiy bo‘lib, ular ma’lum bir iste’molchiga (TOU, operatsion xodimlar, tegishli avtomatlashtirilgan boshqaruv tizimlari va boshqalar) qaratilgan.
Avtomatlashtirilgan jarayonlarni boshqarish tizimlarining yordamchi funksiyalari tizim ichidagi vazifalarni hal qilishni ta’minlaydi va tizimdan tashqarida iste’molchiga ega emas. Ular texnologik jarayonlarni boshqarishning avtomatlashtirilgan tizimining texnik vositalari (AVT) majmuasining ishlashini ta’minlaydi.
TJ ABT tasnifi:
— markazlashtirilgan;
— taqsimlangan.
Nazorat savollari
1. Texnologik jarayonlarni avtomatlashtirishdan maqsad nima?
2. TJ ABT funksiyalari qanday sinflarga bo‘linadi?
3. TJ ABT boshqaruvining asosiy funksiyalari nimalardan iborat?
4. TJ ABT axborot funksiyalari nimalarni o‘z ichiga oladi?
2.4. Markazlashtirilgan jarayonlarni boshqarish tizimlari
Markazlashtirilgan texnologik boshqaruv tizimlarida markaziy boshqaruv postining kompyuter xonasida bitta elektron qurilma (kompyuter) o‘rnatilgan.
TJ ABT funksiyalarini amalga oshirish rejimiga ko‘ra, ular quyidagilarga bo‘linadi:
1. TJ ABT boshqaruv funksiyalarini avtomatlashtirilgan tarzda bajaruvchi
Bunday avtomatlashtirilgan jarayonlarni boshqarish tizimlarida operator-texnolog qaror ishlab chiqadi (yoki qabul qiladi) va (yoki) nazoratni amalga oshiradi. Quyidagi tiplar mavjud:
1.1. Kompyuter tizimi (KT) axborotchi funksiyasini o‘taydi, bajarish qo‘lda boshqariladigan TJ ABT. Inson nazorat harakatlarini tanlaydi va amalga oshiradi.
1.2. «Maslahatchi» rejimida KT bilan TJ ABT. Bu erda KT kiritilgan ma’lumotlarni tahlil qiladi, optimal yechimni qidiradi, vizual displey qurilmalarini (VDQ) boshqarish bo‘yicha tavsiyalar (maslahat) beradi. Operator-texnolog maslahati va o‘ziga ko‘ra nazoratni tanlaydi va amalga oshiradi.
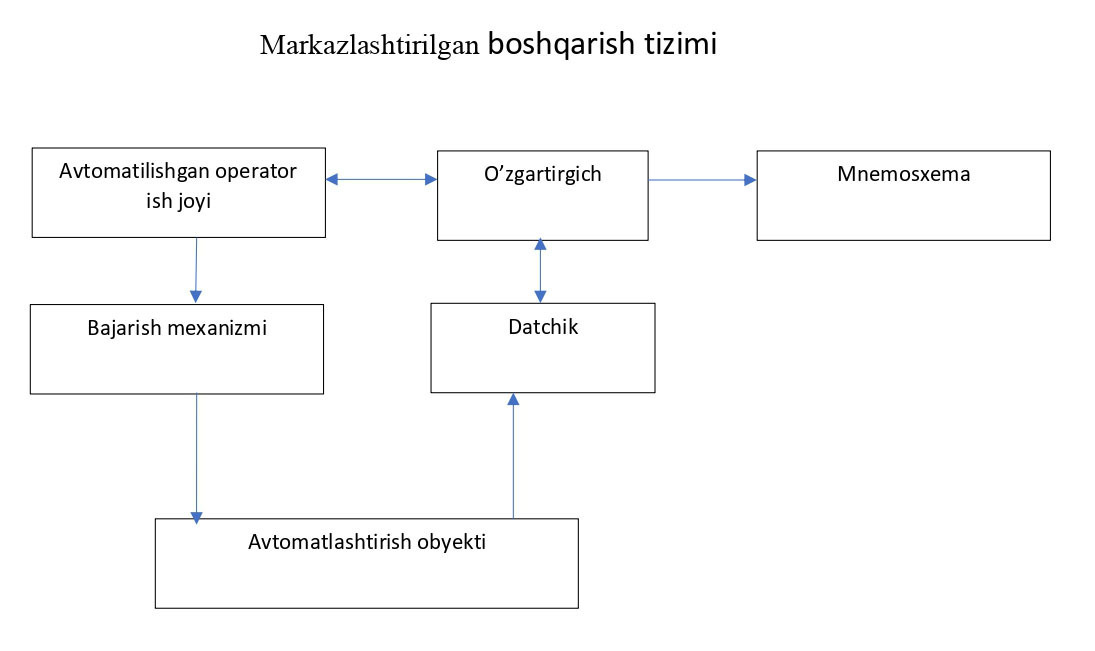
Bunday avtomatlashtirilgan jarayonni boshqarish tizimining blok sxemasi 2.5-rasmda ko‘rsatilgan., bunda quyidagi belgilar kiritiladi: — operator-texnologning avtomatlashtirilgan ish joyi; ART — avtomatik rostlash tizimlari. Boshqaruv panelidan operator-texnolog ART sozlamalarini o‘rnatadi. Teskari ARTga informatsiyalar bevosita manbalaridan olinadi.
Nazorat savollari
1. TJ ABT qanday turlarga bo‘linadi?
2. Rostlash qurilmasi nima?
3. Mnemosxema nima?
4. Yuqori ABT nima?
III BOB. ABTOMATLASHTIRISHNING ASOSIY TEXNIK VOSITALAR TARKIBI
Texnik vositalarning asosiy tiplari sifatida quyidagilarni sanab o‘tish mumkin:
1- sath qurilmalar:
— sensorlar (datchiklar);
— boshqaruv modullari;
— topshiriq berish bloklari;
— mantiqiy-buyruqli boshqaruv modullari;
— galvanik izolatsiya modullari;
— signalni normallashtirish va filtrlash modullari;
— ma’lumotlarni taqdim etish modullari;
— boshqaruv harakatlari modullari;
— bufer xotirasi;
— dasturlashtiriladigan taymerlar;
— funksional konvertorlar.
II sath — apparat va dasturiy ta’minot (holat uchun yechim to‘plangan
intellektual vazifalar, moslashuvchan algoritmik tuzilma):
— dasturiy mantiqiy boshqaruv bloki;
— ko‘p kanalli ma’lumotlarni yig‘ish va qayta ishlash bloki;
— PLC dasturlashtiriladigan mantiqiy kontrollerlar (PLC).
III sath — umum tizim vositalari:
— aloqa adapterlari;
— umumiy xotira bloklari;
— avariya qurilmalar (avariya holatlarida tizim holatlarini qayd etish);
— operator konsoli (umum tizimni nazorat qiladi);
— signalizatsiya va boshqaruv sxemalari.
Texnik vositalar axborot tamoyiliga ko‘ra bo‘linish quyidagicha ifodalash mumkin:
— obyekt yoki jarayonning holati to‘g‘risida ma’lumot olish uchun qurilmalar (datchiklar, qurilmalar);
— asosiy ma’lumotlarni o‘zgartirish uchun qurilmalar (normallashtirish
qurilmalar, elektr izolatsiyasi va kodlash) axborotni uzatish uchun aloqa kanallari orqali;
— axborotni konvertatsiya qilish, qayta ishlash, saqlash va buyruqlar va boshqaruv harakatlarini yaratish qurilmalari (kompyuter texnologiyalari, algoritmlar);
— axborotni konvertatsiya qilish va boshqaruv buyruqlarini uzatish qurilmalari (harakatlantiruvchi qurilmaga uzatish uchun);
— buyruq ma’lumotlarini (drayvlarni) bajarish, kuchaytirish uchun qurilmalar;
— ijro etuvchi qurilmalar va tartibga soluvchi organlar (to‘sqichlar, tiristorlar, konvertorlar).
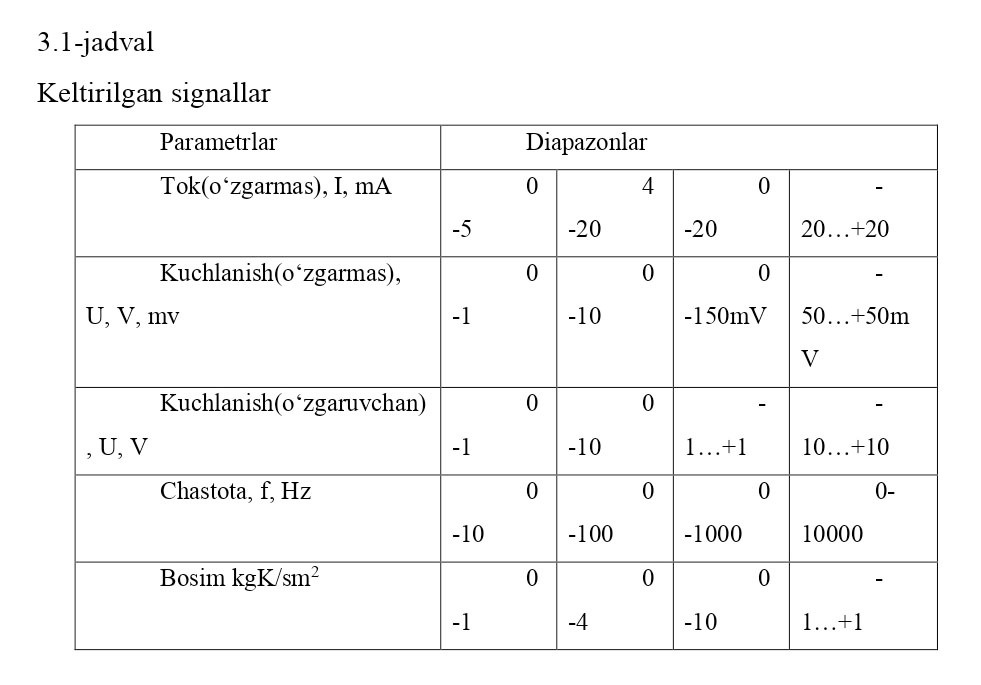
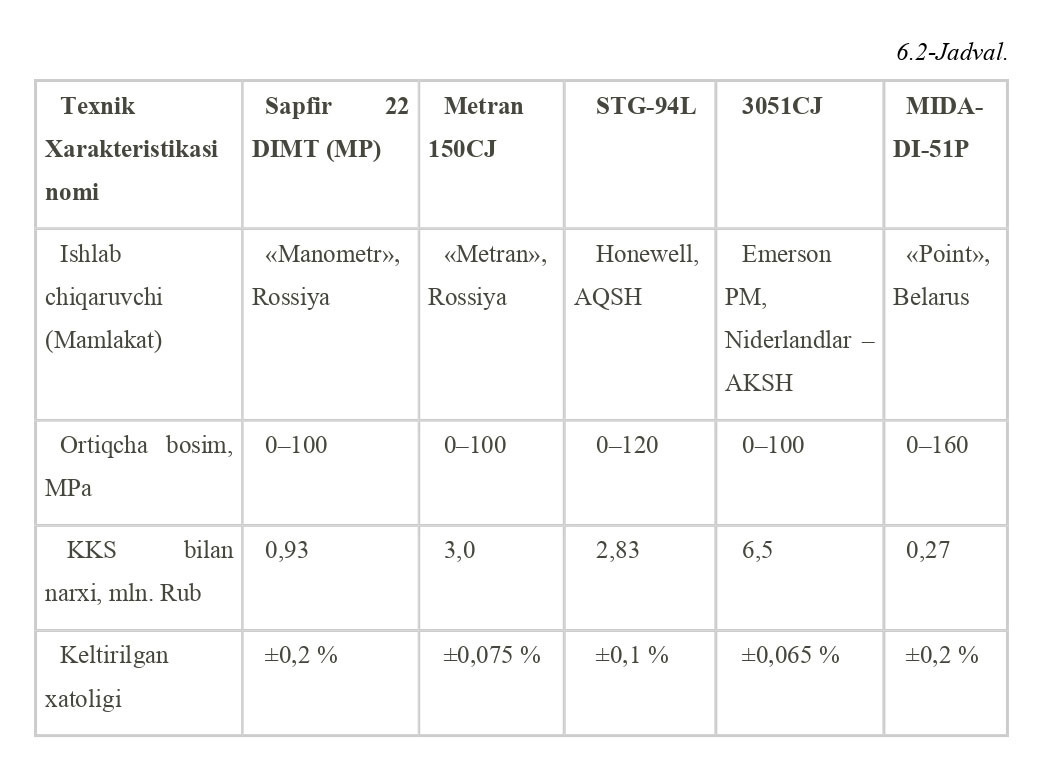
Uskunalarni birgalikda faoliyat yuritish muammosi TJ ABTni birlashtirishni joriy qilishni talab qiladi — ulanish uchun ma’lum parametrlar bo‘yicha qurilmalarni standartlashtirish, ularni bir-biriga qo‘shimcha qurilmalarsiz ulash imkoniyati bo‘lmasligi mumkin. Xususan, zarur qurilmalar o‘rtasida almashinadigan signallar parametrlarini birlashtirish uchun keltirilgan signallarga o‘tish lozim (3.1-jadvaldagi misol).
Masalan «4 — 20 mA» diapazonidagi joriy standart quyidagi afzalliklarga ega:
— tizimdagi sim uzilishini sezish oson;
— 4 mA qo‘shimcha tok yordamida masofaviy datchiklar yoki qurilmalarni quvvatlantirish mumkin;
— signal bir juft sim orqali uzatiladi yoki qabul qilinadi.
Nazorat savollari
1. ABT da sensorlar (datchiklar) qanday vazifani bajaradi?
2. Boshqaruv modullari qanday qurilmalardan tashkil etiladi?
3. Galvanik izolatsiya modullari nima uchun kerak?
4. Ma’lumotlarni taqdim etish modullariga qanday qurilmalar kiradi?
5. Keltirilgan signal nima?
IV BOB. OBYEKT HAQIDA MA’LUMOTLARNI QABUL QILISH QURILMALARI. SENSORLAR
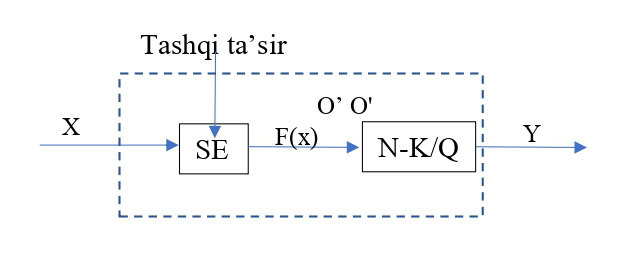
Birlamchi axborot qurilmalari — sensorlar — ma’lumotni mazmunini o‘zgartirmasdan yig‘ish va o‘zgartirish uchun mo‘ljallangan. Sensor ikki qismdan iborat (4.1-rasm):
Sensor elementi — chiqishida tabiiy (standartlashtirilmagan) parametrni ma’lum signalga o‘zgartiruvchi sezgir element;
— sezgir elementning chiqish qiymatini standart shaklga keltiradigan o‘lchov qurilmasi (4.2-rasm). Ko‘pincha, bu qismlar tizimli ravishda bitta korpusda amalga oshiriladi, buning natijasida birlashtirilgan chiqishga ega signal «sensor» dan olinadi.
Ammo ular alohida ishlab chiqarilgan mustaqil qurilmalar bo‘lishi ham mumkin.
Sensor — bu boshqariladigan qiymatni o‘lchash, saqlash, qayta ishlash va uzatish uchun qulay bo‘lgan signalga aylantiruvchi o‘lchash, signalizatsiya, tartibga solish yoki boshqarish moslamasining elementi.
Boshqacha qilib aytganda, sensor bu har qanday fizik kattalikning boshqarish tizimiga kirishiga, keyingi foydalanish uchun qulay bo‘lgan signalga aylantiradigan qurilma.
Sensorlar tomonidan o‘zgartirilgan kirishda o‘lchanadigan va boshqariladigan qiymatlar TJ ning fizik parametrlariga mos keladi. Masalan, quyidagi texnologik parametrlar keng tarqalgan:
— energetik parametrlar: harorat, bosim, bosimning pasayishi, sath, sarf;
— elektr parametrlar: o‘zgaruvchan va o‘zgarmas tok, o‘zgarmas va o‘zgaruvchan kuchlanish, aktiv/reaktiv quvvat, to‘la quvvat, quvvat koeffitsienti, chastota, induksiya;
— mexanik kattaliklar: chiziqli, burchakli (burchak) tezligi, deformatsiya, kuch, moment, qattiqlik, tebranish, massa, shovqin;
— kimyoviy: konsentratsiyasi, kimyoviy tarkibi, kimyoviy xossalari;
— fizik: namlik, zichlik, yopishqoqlik, loyqalik, elektr o‘tkazuvchanlik, magnit kirituvchanlik.
Sensordan chiqish kattaliklari odatda modulatsiya qilinadi:
— amplituda bo‘yicha;
— vaqt atributi (chastota, faza va boshqalar);
— kodi bo‘yicha;
— fazaviy xususiyat (aloqa kanallarida signallarning almashinishi).
O«lchov o‘zgartichlarining (sensorlarning) asosiy parametrlari:
1. Kirish qiymatini o‘zgartirish diapazoni (kirish diapazoni, qiymat turi).
2. Chiqish signalining qiymatini o‘zgartirish diapazoni.
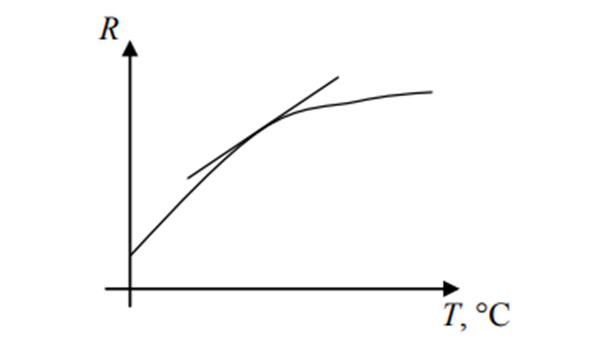
3. Statik xarakteristikalari (aniqlik darajasi). Dinamik xatolarni hisobga olmagan holda kirish va chiqish qiymati o‘rtasidagi munosabatni ko‘rsatadi (4.2-rasmga qarang). Umuman olganda, bu xususiyat chiziqli emas. Odatda ishchi nuqtasida chiziqli bo‘ladi (4.2-rasmdagi to‘g‘ri chiziqlar).
Dinamik xarakteristikalar (maksimal chastota, chiqish signalini vaqt bo‘yicha qiymatlari) o‘tish rejimda chiqish qiymatining kirish qiymatiga bog‘liqligini ko‘rsatadi (4.3-rasm).
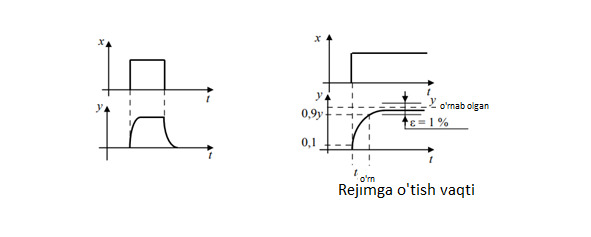
Agar sensor kirishiga turli chastotali o‘zgaruvchan signal qo‘llanilsa, sensorning chastotali xarakteristikasi o‘rganiladi, u quyidagi rasmda ifodalangan.
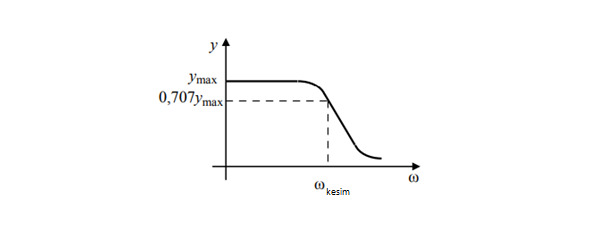
Bu yerda ωkesm — bu kesim chastotasi, uzatish koeffitsienti 3 dB ga o‘zgarganda chastota boshlang‘ich qiymatdan 0,707 ga teng bo‘lgan kesish chastotasi. Kesish chastotasi tiklanish vaqti t = 1/ ωkesm ga to‘g‘ri keladi.
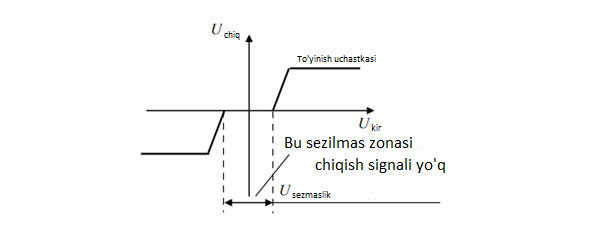
Sezuvchanlik chegarasi (sezmas zona) — shovqin va tashqi ta’sirni kamaytirish uchun kiritiladi. U sezmas zona bir tomonlama yoki ikki tomonlama bo‘lishi mumkin (4.5-rasm).
Nazorat savollari
1. Sensorlarni vazifasi nima?
2. Sensorlar qanday qisimlardan iborat?
3. Sensordan chiqish kattaliklari qanday modulyatsiya qilinadi?
4. O‘lchov o‘zgartichlarining (sensorlarning) asosiy parametrlari qaysilar?
5. Sensorlarning dinamik va statik xususiyatlarini farqini tushuntiring.
V BOB. Xatoliklar
O«lchash va boshqarish tizimlarida ma’lum xatoliklar kuzatiladi. Ularni shartli quyidagilarga bo‘lish mumkin:
— asosiy Sasos;
— qo‘shimcha Sqo‘sh (qo‘shimcha omillar tufayli yuzaga keladi namlik, harorat va boshqalar).
Biz qo‘shimcha omillarni hisobga olgan holda umumiy xatoni hisobga olamiz:
Qo‘shimcha xato texnologik parametrlarining funksiyasi sifatida aniqlanadi:
Loyihalash jarayonida tanlangan sensorlarga qo‘yiladigan asosiy talablar:
— chiqish qiymatining kirishga aniq bog‘liqligi;
— vaqt bo‘yicha xususiyatlarning barqarorligi;
— yuqori sezuvchanlik;
— obyektga nisbatan kichik o‘lcham va vazn;
— nazorat qilinadigan jarayon bo‘yicha va boshqariladigan parametr bo‘yicha hech qanday aks ta’sir yo‘q;
— har xil ish sharoitlarida ishlash;
— chiqish signallarini boshqa tizim vositalari bilan birlashtirish;
— turli markalilarini o‘rnatish imkoniyatlari.
Nazorat savollari
1. Asosiy xatoliklarga qaysilar kiradi?
2. Qo‘shimcha xatoliklar manbalarini tushuntiring?
3. Sensorlarga qanday talablar qo‘yiladi?
4. Xatoliklar qanday kamaytiriladi?
VI BOB. SENSORLARNING TASNIFI
Avtomatlashtirish tizimlarida qo‘llaniladigan sensorlar juda xilma-xil bo‘lib, ularni turli mezonlarga ko‘ra tasniflash mumkin.
6.1. Kirish kattaliklari bo‘yicha tasniflash
I. Mexanik datchiklar:
— elastik (membranalar);
— drosselli (bosimning pasayishi nazoratda o‘lchanadi);
— hajmli;
— suzuvchi;
— tezkor.
II. Elektromexanik sensorlar:
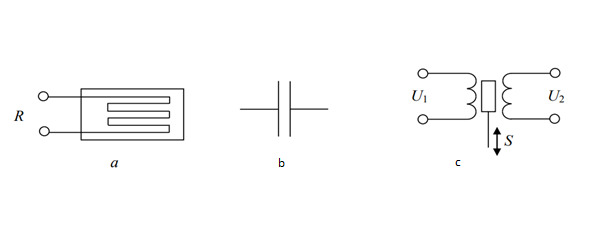
— tensorezistiv (obyektning deformatsiyasi sim o‘tkazgich deformatsiyani keltirib chiqaradi).
Deformatsiya tufayli sim cho‘zilib ketadi, uning uzunligi l oshadi, diametri d kamayadi, R simining qarshiligi oshadi — bu Puasson effektining ko‘rinishidir (6.1-rasm, a):
— siljishni o‘lchash uchun elektrostatik (6.1-rasm, b);
— elektromagnit — markaz o‘rnini o‘zgartirish chiqish signali (6.1-rasm, c);
— taxometrik (aylanishlar sonini o‘lchash).
III. Elektr sensorlari:
— konduktometrik (o‘tkazuvchanligini o‘lchash);
— potentsiometrik (voltaj elektrodlar orasiga o‘rnatiladi);
— polarografik (harakat ularning tarkibini aniqlash uchun eritmalar chegarasida qutblanish hodisasiga asoslanadi).
IV. Termal sensorlar:
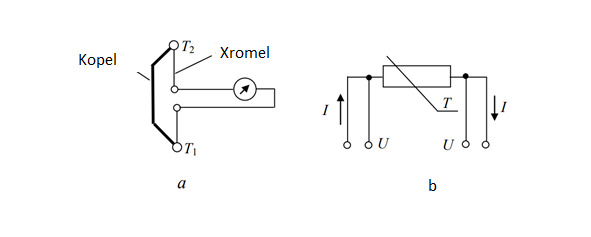
— termoelektrik (termojuft — 6.2-rasm, a).
— termorezistiv (bunday sensorlarda qarshilik harorat bo‘yicha bog‘liq, past, o‘rta va yuqori haroratlar uchun qo‘llaniladi (6.2-rasm, b));
— termomexanik (bunday datchiklarning asosini bimetalik listlar tashkil etadi.
— bir xil haroratgacha metall bu haroratda o‘z holatini «eslab qoladi» va bir xil shaklni oladi);
— manometrik (bunday datchiklar membrana va ko‘rgichdan iborat, unda suyuq yoki gazsimon muhit mavjud);
— termokonduktometrik (bunday datchiklarning harakati muhitning o‘tkazuvchanligining haroratga bog‘liqligiga asoslanadi).
V. Optik sensorlar:
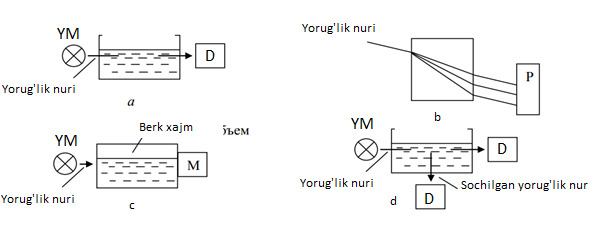
— fotokolorimetrik (ular yorug‘lik kvantlarini yutadi, selektiv uzatish sodir bo‘ladi, ma’lum bir spektral komponentning intensivligi baholanadi) (6.3-rasm, a);
— refraktometrik (sensor ko‘rsatkichlarining og‘ishi sinishi ko‘rsatkichlari farqi tufayli yuzaga keladi, og‘ish burchagi n = f (k) muhitga bog‘liq, bu moddaning tarkibini va uning tuzilishini aniqlashga imkon beradi) (6.3-rasm, b);
— opto-akustik (sensordagi gaz nurlanadi, bu tovush paydo bo‘lishiga olib keladi, o‘lchov buzilmaydi va kontaktsiz) (6.3-rasm, c).
— nefelometrik (ish prinsipi: muhitning loyqaligi yorug‘likning tarqalishini o‘lchash yo‘li bilan aniqlanadi) (6.3-rasm, d).
VI. Elektron sensorlar:
— induksion (aylanish yoki sarfni o‘lchash uchun qo‘llaniladi);
— xromatografik (suyuqliklardagi aralashmalar konsentratsiyasini o‘lchash uchun qo‘llaniladi);
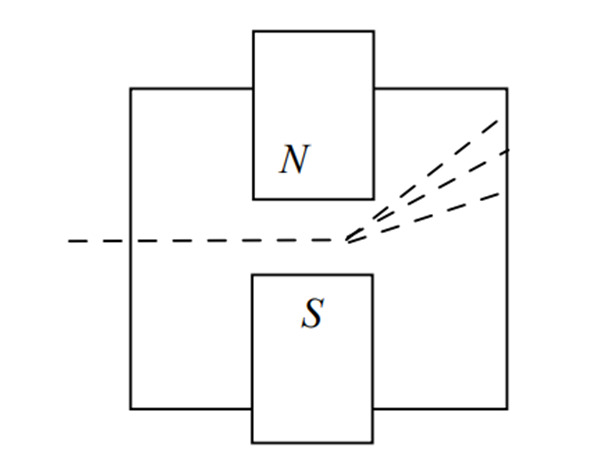
— mass-spektrometrik (magnit maydon orqali ionlangan zarrachalarning yo‘naltirilgan oqimi o‘tkaziladi; zarralar massasi qanchalik katta bo‘lsa, zarrachalar oqimi shunchalik kam og‘adi. Og‘ish spektri zarrachalarning massa bo‘yicha taqsimlanishini ko‘rsatadi) (6.4-rasm);
— magnit;
— radioizotop;
— dielkometrik (moddalarning xossalarini dielektrik o‘tkazuvchanligi bilan o‘lchash).
Nazorat savollari
1. Mexanik datchiklar qanday turlarga bo‘linadi?
2. Elektromexanik sensorlarga misol keltiring.
3. Elektr sensorlarga qaysi sensorlar kiradi?
4. Termal sensorlarga misollar keltiring.
5. Optik sensorlarga misollar keltiting.
6. Elektron sensorlarga misollar keltiring.
6.2. Sensorlarni chiqish kattaligi bo‘yicha tasniflash
Sensorlarning uchta toifasi mavjud:
— analog sensorlar, ya’ni kirish qiymatining o‘zgarishiga mutanosib ravishda analog signal ishlab chiqaradigan sensorlar;
— impulslar ketma-ketligini yoki ikkilik so‘zni yaratuvchi raqamli sensorlar;
— faqat ikkita darajadagi signalni yaratadigan ikkilik (ikkilik holati) sensorlar: «yoqish / o‘chirish» (0 yoki 1). Ular soddaligi tufayli keng qo‘llaniladi.
Sensorlarning aksariyati elektr chiqish signaliga ega. Bu elektr o‘lchovlarining quyidagi afzalliklari bilan bog‘liq:
— elektr kattaliklari masofaga qulay tarzda uzatiladi va uzatish yuqori tezlikda amalga oshiriladi;
— elektr kattaliklari universal bo‘lib, boshqa har qanday kattaliklarni elektr kattaliklariga aylantirish mumkin va aksincha;
— ular aniq raqamli kodga aylantiriladi va o‘lchov vositalarining yuqori aniqligi, sezgirligi va tezligiga erishishga imkon beradi.
Hozirgi vaqtda sensorlarning eng keng tarqalgan chiqish signallari standart tok va kuchlanish signallaridir.
Ularning orasida eng qulay va eng keng tarqalgani 4 — 20 mA tok signalidir. Bu masofaviy datchiklardan ikkilamchi o‘lchash asboblariga signallarni uzatish bilan bog‘liq muammolarni eng yaxshi hal qiladi.
Sensor signallari odatda juda kichik. Sanoat muhitida kuchli elektromagnit shovqinlar foydali signallardan yuzlab yoki minglab marta ko‘proq soxta signallarni yaratishi mumkin. 4 — 20 mA darajadagi tok signallari past qarshilikli yuklamani boshqaradi, natijada ularga kamroq ta’sir qiladi.
Shuni ta’kidlash kerakki, 4 — 20 mA tok signali bilan ishlashda aloqa liniyasidagi uzilishni aniqlash oson — agar sim uzilgan bo‘lsa zanjirdagi tok nolga teng bo‘ladi, ya’ni u mumkin bo‘lgan chegaralardan chiqib ketadi. Masalan, 0 — 5 mA signali bo‘lgan kontaktlarning zanglashiga olib kelishini aniqlab bo‘lmaydi, chunki nolga teng tok eng kichik qiymat sifatida olinib, maqbul deb hisoblanadi.
Nazorat savollari
1. Sensorlar qanday signallar chiqaradi?
2. Diskret signall qanday signallar?
3. Raqamli signallar diskret signallardan qanday farqlanadi?
4. Analog signallar qanday signallar?
5. Elektr signallarini yutuqlari nimada?
6.3. Sensorlarni ishlash prinsipiga ko‘ra tasniflash
Ishlash prinsipiga ko‘ra, sensorlar generator va parametriklarga bo‘linadi.
Generator sensorlari kirish qiymatini to‘g‘ridan-to‘g‘ri elektr signaliga aylantirishni amalga oshiradi. Bunday sensorlar kirish (o‘lchangan) kattalik manbaining energiyasini darhol elektr energiyasiga aylantiradi. Signal, ya’ni ular xuddi elektr energiyasining generatorlari. Bunday sensorlarning ishlashi uchun qo‘shimcha quvvat manbalari prinsipial jihatdan talab qilinmaydi (shunga qaramay, sensorning chiqish signalini kuchaytirish, uni boshqa turdagi signallarga aylantirish va boshqa maqsadlar uchun qo‘shimcha quvvat talab qilinishi mumkin).
Generator sensorlari, o‘z navbatida, fotoelektrik, termoelektrik, piezoelektrik, induksiya va boshqalarga bo‘linadi.
Fotoelektrik sensorlar (fotosensorlar) — chiqish signalini atrof-muhit yorug‘ligiga mutanosib ravishda aylantiradi.
Analog va diskret fotoelektrik sensorlar mavjud. Analog sensorlar uchun chiqish signali atrof-muhit yorug‘ligiga mutanosib ravishda o‘zgaradi. Qo‘llashning asosiy sohasi — avtomatlashtirilgan yoritishni boshqarish tizimlari. Diskret turdagi sensorlar yorug‘likning belgilangan qiymatiga erishilganda chiqish holatini teskarisiga o‘zgartiradi.
Fotoelektrik sensorlar deyarli barcha sohalarda qo‘llanilishi mumkin. Diskret harakat sensorlari hisoblash uchun bir xil yaqinlik kalitlari sifatida ishlatiladi, ular har qanday ishlab chiqarish liniyasida aniqlash, joylashtirish va boshqa vazifalarda keng qo‘llaniladi.
Fotoelektrik kontaktsiz sensor boshqariladigan hududdagi yorug‘lik oqimining o‘zgarishini qayd etadi, bu mexanizmlar va mashinalarning har qanday harakatlanuvchi qismlarining kosmosdagi holatining o‘zgarishi, obyektlarning yo‘qligi yoki mavjudligi bilan bog‘liq. Uzoq masofalar uchun ham qo‘llaniladi.
Optik kontaktsiz foto datchiklar sanoatda va undan tashqarida keng qo‘llaniladi.
Fotoelektrik kontaksiz sensori ikkita funksional blokdan iborat — qabul qiluvchi va nurlanuvchi. Ushbu tugunlar bitta korpusda ham, turli korpuslarda ham amalga oshirilishi mumkin.
Obyektni aniqlash usuliga ko‘ra, foto datchiklar to‘rt guruhga bo‘linadi:
1) nurni kesib o‘tish — bu usul bilan uzatuvchi va qabul qilgich turli korpuslarga bo‘linadi, bu ularni ish masofasida bir-biriga qarama-qarshi o‘rnatish imkonini beradi. Ishlash prinsipi uzatuvchi doimiy ravishda qabul qiluvchi tomonidan qabul qilinadigan yorug‘lik nurini yuborishiga asoslanadi. Sensorning yorug‘lik signali uchinchi tomon obyekt bilan to‘silsa, qabul qiluvchi darhol chiqish holatini o‘zgartirib javob beradi;
2) reflektordan aks ettirish — bu usul bilan sensorning qabul qiluvchisi va uzatuvchisi bir korpusda joylashgan. Sensorning qarshisida reflektor (reflektor) o‘rnatilgan. Reflektor sensorlari polarizatsiya tufayli shunday yaratilgan. Filtr, ular aks ettirishni faqat reflektordan qabul qiladilar. Bu reflektorlar ikki tomonlama aks ettirish prinsipi asosida ishlaydi. Tegishli reflektorni tanlash kerakli masofa va o‘rnatish imkoniyatlari bilan belgilanadi.
Nurlantiruvchi tomonidan yuborilgan, reflektordan aks ettirilgan yorug‘lik signali sensor qabul qiluvchiga kiradi. Agar yorug‘lik signali to‘xtasa, qabul qiluvchi darhol chiqish holatini o‘zgartirib javob beradi;
3) obyektdan aks ettirish — bu usul bilan sensorning qabul qiluvchisi va uzatuvchisi bir xil korpusda joylashgan. Sensorning ish holatida uning ish maydoniga tushgan barcha obyektlar o‘ziga xos reflektorga aylanadi. Obyektdan aks ettirilgan yorug‘lik nuri tegishi bilanoq sensor qabul qiluvchiga, u darhol chiqish holatini o‘zgartiradi;
4) obyektdan qat’iy aks ettirish — sensorning ishlash prinsipi «obyektdan ko‘zgu» bilan bir xil, lekin obyektni sozlashdan og‘ishlarga nisbatan sezgirroq. Masalan, kefir shishasida singan to‘lqin, vakuumning to‘liq to‘ldirilmaganligini aniqlash mumkin. Bu sensorlar oziq-ovqat mahsulotlarini qadoqlash va boshqalarda keng foydalanadi.
Maqsadiga ko‘ra, fotosensorlar ikkita asosiy guruhga bo‘linadi:
Umumiy maqsadli sensorlar va maxsus sensorlar. Maxsus turlarga torroq vazifalarni hal qilish uchun mo‘ljallangan sensorlar kiradi (masalan, obyektdagi rang belgisini aniqlash, kontrastli chegarani aniqlash, shaffof paketdagi yorliqning mavjudligi va boshqalar).
Sensorning vazifasi masofadagi obyektni aniqlashdir. Bu masofa tanlangan turga qarab 0,3 mm. dan 50 m.gacha o‘zgarib turadi. Sensorlar aniqlash usuli ham muhim.
Nazorat savollari
1. Sensorlar ishlash pinsiplariga ko‘ra qanday guruhlarga bo‘linadi?
2. Generator sensorlar qanday datchiklar?
3. Parametrik sensorlarni ishlash prinsipini tushuntiring.
4. Fotoelektrik datchiklar qanday ishlaydi?
5. Induksion datchiklar qaysi guruhga kiradi?
6.4. Haroratni o‘lchash
Harorat — bu tizimning termodinamik muvozanat holatini tavsiflovchi va muhandislik tizimlarining asosiy parametrlaridan biri bo‘lgan fizik kattalik. Haroratni o‘lchash uchun har xil harorat o‘lchovlari taklif etiladi.
Termodinamik harorat shkalasida asosiy harorat diapazonining pastki chegarasi absolyut nol (0 K) nuqtasi bo‘lib, «suvning uchli nuqtasi» yuqori chegara sifatida qabul qilinadi. Ushbu nuqtaga 273,16 K raqamli qiymati berilgan edi. Suvning uchli nuqtasi bu suvning uch fazasi: qattiq (muz), suyuq va gazsimon (bug») o‘rtasidagi muvozanat harorati. Termodinamik harorat birligi Kelvin bo‘lib, u suvning absolyut noldan uch baravarigacha bo‘lgan oralig‘ining 1/273,16 qismidir.
Amaliyotda ko‘pincha halqaro amaliy harorat o‘lchovi qo‘llaniladi. Ushbu o‘lchovda asosiy harorat oralig‘ini cheklaydigan mos yozuvlar nuqtalari sifatida muzning erishi (0 º C) va normal atmosfera bosimidagi qaynash harorati (100º C) qabul qilindi. Harorat birligi Selsiy darajasidir, 1/100 qismga teng asosiy harorat oralig‘i. Kelvinda ko‘rsatilgan T harorati va Selsiy darajasida ko‘rsatilgan t harorati o‘rtasida o‘zaro bog‘liqlik mavjud: t = T — 273.16.
Haroratni o‘lchash uchun qo‘llaniladigan asboblarni termometrlar deyiladi. Ishlash prinsipiga ko‘ra termometrlar kengayish termometrlariga (suyuq va mexanik), manometrik, termoelektrlarga bo‘linadi. Termoelektr qurilmalar qarshilik termometrlari va termojuftlikga bo‘linadi.
Kengayish termometrlari haroratni suyuqlikning yoki qattiq jismlarning (dilatometrik va bimetalik) issiqlik kengayishidan o‘lchaydilar.
Suyuq shisha termometrlarda o‘lchangan haroratning qiymatiga qarab simob ishchi moddalar sifatida ishlatiladi (o‘lchanish harorat oralig‘i -35 dan +600 ºC gacha), spirt (-80 dan +70 ºC gacha), kerosin (-66 dan +200 ºC gacha). Suyuq termometrlarning bo‘linish shkalasi 0,5, 1, 2, 5, 10 ºC. Xatoligi bitta bo‘linishdan oshmaydi.
Kontaktli termometrlar simob bilan to‘ldirilgan shisha datchiklardir. Ular bitta, ikki yoki uchta kontakt moslamalari bilan jihozlangan. Harorat o‘zgarganda, kontaktlar yopiladi yoki ochiladi.
Dilatometrik termometrlarning ishlash prinsipi har xil harorat kengayish koeffitsientlari bo‘lgan materiallardan yasalgan ikki qismning chiziqli cho‘zilishidagi farqqa asoslangan, masalan, kengayish koeffitsienti deyarli nolga teng bo‘lgan invar (nikel va temir qotishmasi) va katta kengayish koeffitsienti bilan guruch.
Dilatometrik termometr Invar sterjeni, tunnel trubkasi va ko‘rsatkich o‘qidan iborat (6.5-rasm).
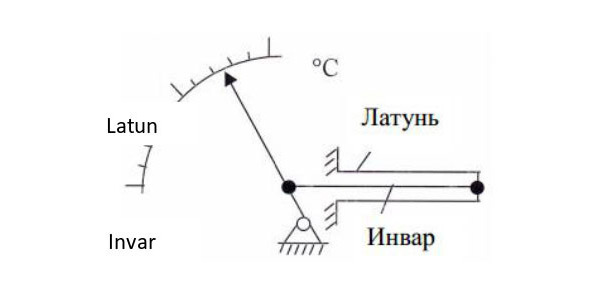
Invar sterjenning bir uchi tunel naychasining pastki qismiga, ikkinchisi o‘qqa ulangan. Haroratga qarab ikki sterjen cho‘zilishida farq bor. Bunday holda, sterjenning bo‘sh uchi o‘qni buradi. O‘lchashni sezgichlarida strelka harakati kontaktlarning yopilishiga yoki ochilishiga olib keladi.
Bimetalik datchik — bu har xil kengayish koeffitsientlari, masalan, po‘lat va invar, ikkita metalldan payvandlangan plastinka. Plastinaning bir uchi qattiq mahkamlangan, ikkinchisi esa plastinkaning egilishi tufayli harorat o‘zgarganda harakatlanadi. Plastinka uchini siljitish qurilmaning ko‘rsatgich o‘qini yoki yozuvchisi ruchkasini harakatga keltiradi.
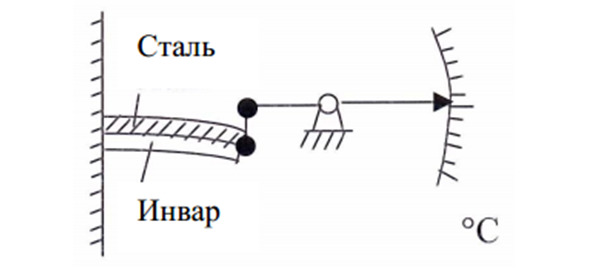
Bimetalik rele datchiklarida bimetallik sezgir elementining bo‘sh uchi boshqariladigan harorat o‘zgarganda kontaktlarni yopadi yoki ochadi.
Mexanik termometrlar konstruksiyasi sodda va ishlashi ishonchli tuzilgan. Biroq, ular doimiy deformatsiyalar va sezilarli inersiya ta’siri tufayli yetarli darajada aniqlikka ega emas. Manometrik termometrlarning ishlash prinsipi yopiq hajmdagi muhit bosimi haroratiga bog‘liqlikka asoslangan. O‘lchov termometri (6.7-rasm) yopiq harorati o‘lchanadigan muhitga botirilgan 1 termosilindrni o‘z ichiga olgan tizim, kapillyar 2 va o‘q bilan bog‘langan sifon (yoki manometrik prujina) 3.
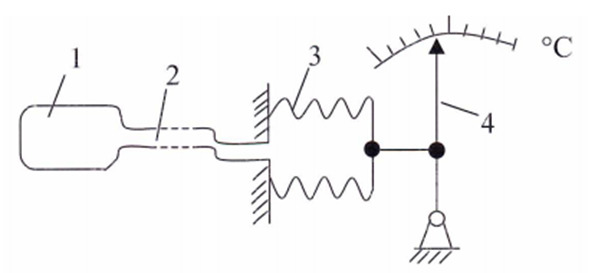
Yopiq tizimdagi muhit turiga qarab bosim termometrlari suyuq (ishchi modda — simob, kremniy organik yoki polimetilsilaksan suyuqlik), gaz (to‘ldiruvchi moddasi — azot yoki argon), kondensat (yoki bug») ga bo‘linadi. Bularda past temperaturalarda qaynaydigan suyuqlik ishlatiladi. — freon, aseton, etil spirt. Termosilindr tushirilgan muhit o‘lchanadigan harorat ko‘tarilishi bilan yopiq tizimdagi bosim ko‘tariladi. Kapillar orqali bosimning bu o‘zgarishi manometrik prujinaga uzatiladi, uning bir uchi qattiq o‘rnatiladi, ikkinchisi esa ortiqcha bosim ta’sirida harakatlanib, o‘qni aylantiradi.
Gaz va suyuq manometrik termometrlarda atrof-muhit harorati o‘zgarishi sababli kapillyar va sifondagi muhit hajmining o‘zgarishi natijasida xato bo‘lishi mumkin. Ushbu xatoning ta’siri kapillar va sifondagi muhit hajmining termosilindr hajmiga nisbati toraytirish bilan kamaytiriladi.
6.4.1. Qarshilik termometrlari
Qarshilik termometrlarining ishlash prinsipi harorat o‘zgarganda elektr o‘tkazuvchanligini o‘zgartirishiga, o‘tkazgichlar va yarimo‘tkazgichlarning xususiyatlariga asoslanadi. O‘tkazuvchilar qarshiligining haroratga bog‘liqligi (6.8-rasm) quyidagi formulada ifodalangan:
RT= R0 [1 + α (T– T0)],
Bu yerda RT — temperatura T dagi qarshilik, R0 — temperatura T0 dagi qarshilik, α — qarshilikni temperatura koeffissienti (QTK).
O«tkazlishlar qarshilik termometrlarini ishlab chiqarish uchun mis va platinadan foydalaniladi. TCM tipidagi mis termometrlari –50 dan 200 ºC gacha bo‘lgan uzoq muddatli haroratni o‘lchash uchun ishlatiladi.
TSP tipidagi platinaviy qarshilik termometrlari –200 dan 650 ºC gacha bo‘lgan haroratni uzoq muddatli o‘lchash uchun ishlatiladi.
O«tkazgichli qarshilik termometrining sezgir elementi spiral yoki ingichka simli o‘ram bo‘lib, himoya korpusiga joylashtirilgan va sopol kukun bilan qoplangan. Himoya korpusi naycha shaklida qilingan va datchikning botish chuqurligini cheklaydigan rezbali armatura va o‘lchov moslamasiga ulanish uchun vintlar bilan bog‘langan bosh bilan jihozlangan.
Qarshilik termometrlari ko‘prik sxemasiga ulaniladi. Sensor o‘lchash sxemasidan sezilarli masofada joylashgan bo‘lishi mumkin. Agar termistor ikkita sim bilan ulangan bo‘lsa, u holda uning simlari termistor bilan ketma-ket ulanadi va xatolik manbai bo‘lib xizmat qilishi mumkin. Chunki simlarning qarshiligi atrof-muhit haroratiga bog‘liq. Shu sababli termistorlar ko‘prik sxemaga uch simli tizimda ulaniladi (6.9-rasm).
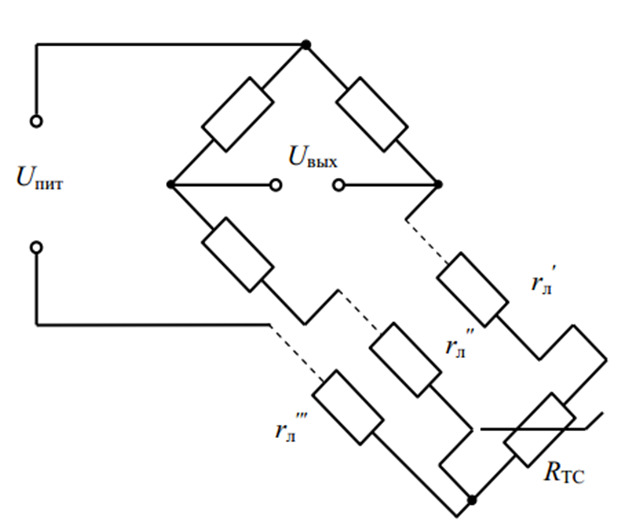
rл» va rл»» qarshiliklari simlarining qarshiligi ko‘prikning qo‘shni yelkasiga ulaniladi va bu ma’lumki, tashqi harorat o‘zgarganda simlarning qarshiligining o‘zgarishi kompensatsiyasini ta’minlaydi.
Avtomatik muvozanatlashtiruvchi ko‘prik qarshilik — termometrlari uchun ikkilamchi asbob sifatida ishlatiladi.
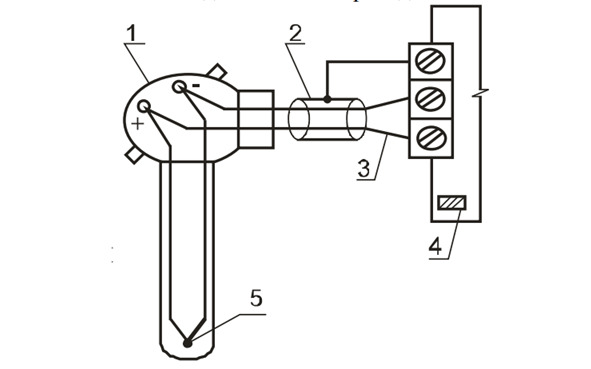
6.4.2.Termoelektrik konvertorlar (termojuftlar/termoparalar)
Ikki xil tarkibli o‘tkazgichni bir uchi kavsharlanib, kavsharlangan qismi qizdirilsa, qizdirilmagan uch qismlari orasida termoelektr yurituvchi kuchi (t.e.yu. k.) hosil bo‘ladi.
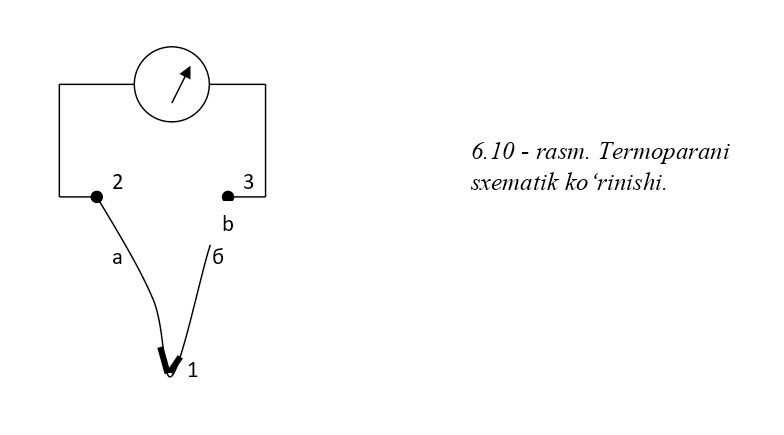
Rasmda «a» va «b» turli tarkibli o‘tkazgichlar, «1» nuqta kavsharlangan bo‘lib «issiq» uchi, «2,3» nuqtalar «sovuq» uchi deb ataladi. Agar «issiq» va «sovuq» uchlaridagi harorat bir xil bo‘lsa, t.e.yu. k. hosil bo‘lmaydi. Shuning uchun harorati o‘lchanadigan muhitga termoparani «issiq» uchi kiritiladi yoki tekkizib ko‘riladi. Hosil bo‘layotgan t.e.yu. k. qiymati «issiq» va «sovuq» uchlar o‘rtasidagi temperaturalar farqi t2–t1 ga proporsional.
E (t, t0) = E (t, 0) — E (t0, 0)
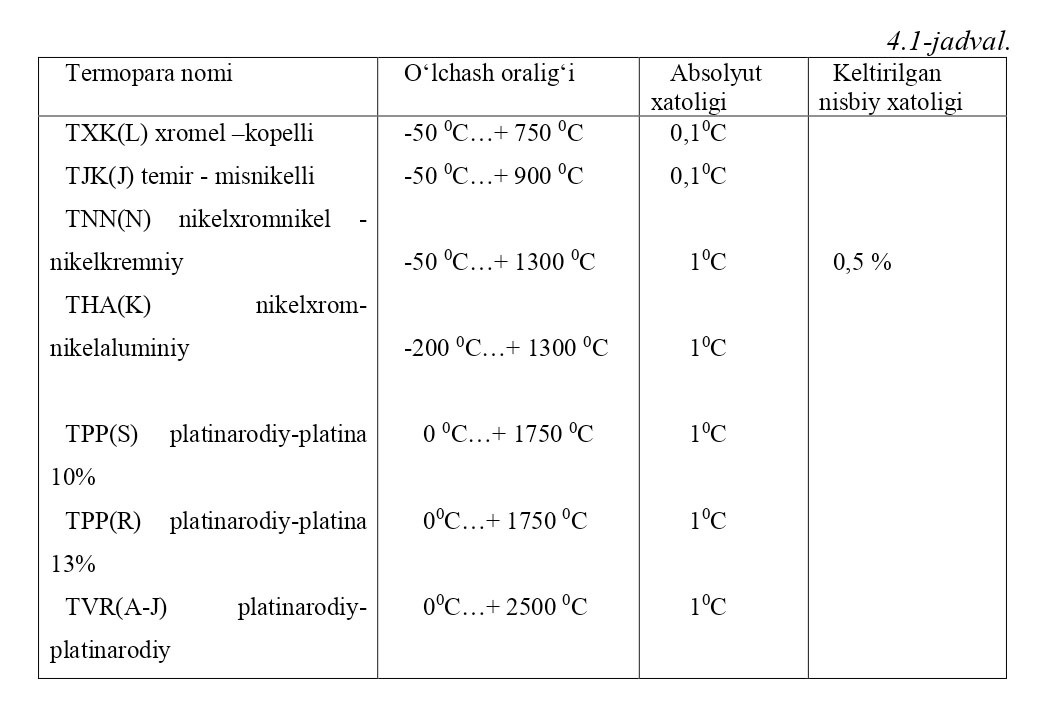
Sanoatda ishlab chiqarishda foydalanish uchun turli markadagi termoparalar tayyorlanmoqda. Dunyo bo‘yicha ular aniq standartlarga keltirilgan bo‘lib turli intervaldagi haroratlarni o‘lchashga mo‘ljalangan. Ulardan keng qo‘llanilayotganlari quyidagi jadvalda berilgan:
Termoparalarni gradirovkalanganda ularni «sovuq» uchlari doimiy 00C ga bo‘lgan holat taminlanadi. Agar tarmoparalarni «sovuq» uchlari tumperaturasi 00C dan farq qilsa, uning berayotgan t.e.yu. k. ga tuzatma kiritish zarur bo‘ladi.
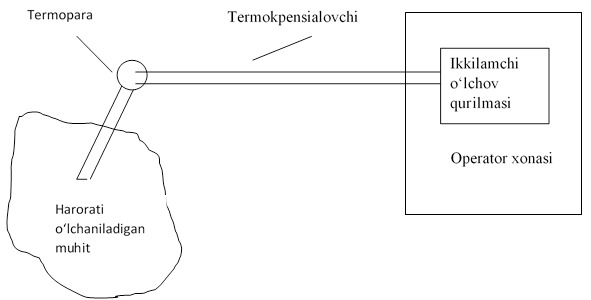
Sxemadan ko‘rinib turibdiki, termoparadan o‘lchov qurilmasigacha bo‘lgan t.e.yu. k. ni uzatish maxsus termokpensialovchi sim orqali amalga oshiriladi. Bu sim odatda qanday turdagi termopara o‘rnatilganiga qarab tanlanadi. Termoparani «sovuq» uchi joylashgan muhit o‘zgarmas temperaturada va ikkilamchi o‘lchov qurilmasi bilan bir xil sharoitda bo‘lsa, bu yerda uzatish simini mis simda davom ettirish mumkin.
Termoparalarni modeli u to‘g‘risidagi ko‘pchilik informatsiyalarni o‘z ichiga oladi. Masalan unversal belgilanish quyidagi informatsiyalarni o‘z ichiga oladi:
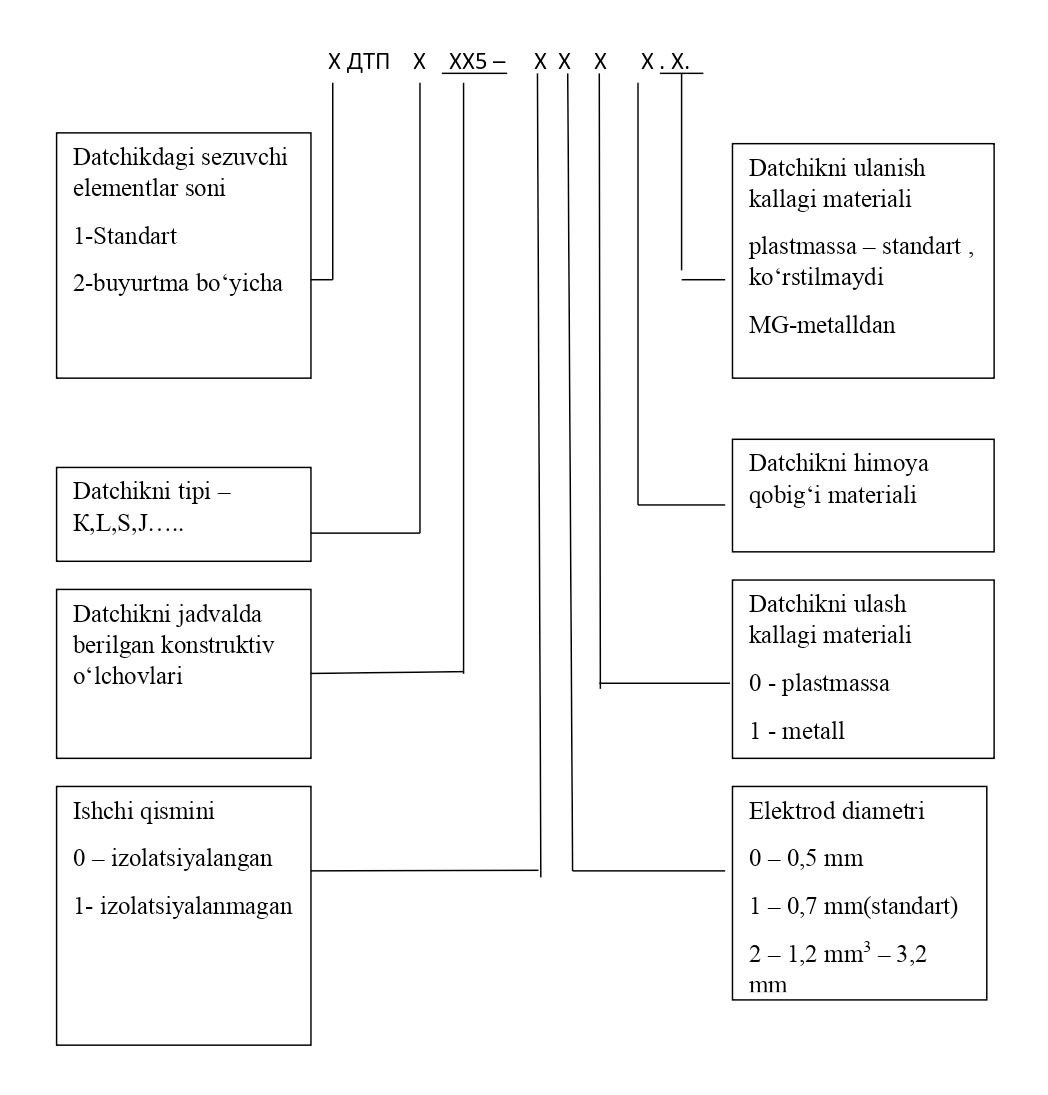
Misol uchun DTPK045 — 0211.120. modeli 1 ta sezuvchi elementli, «xromel-aluminiy», himoya qobig‘i 08x20N14S2 po‘lat, o‘lchash oralig‘i -200 0C…+1300 0C, ishchi uchi izolatsiyalangan, termoelement elektrodi diametri 1.2 mm, metall ulanish kallakli, montaj qismi 120 mm, korpus o‘lchamlari jadvaldagi 045 markasiga mos keladi.
Termoparalarni portlashga xavfli muhitlardagi haroratni o‘lchash uchun ham tayyorlanadi. Ularni bunday modeli nomlanishiga «Yex» belgisi qo‘yiladi.
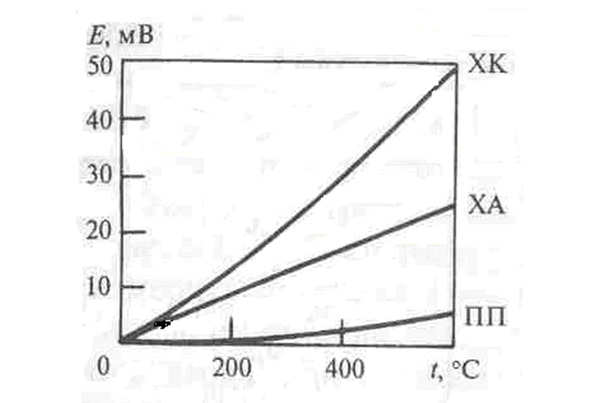
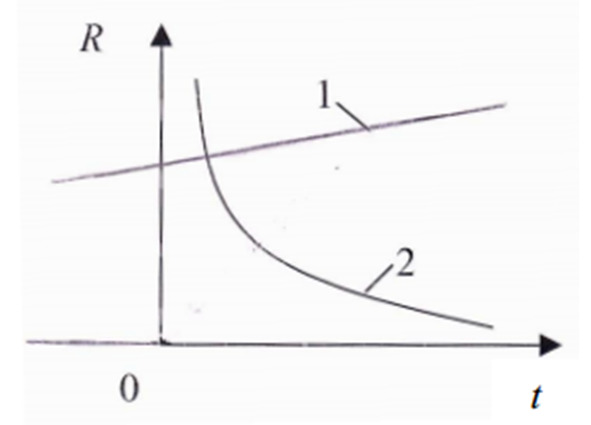
6.12 — rasmdan ko‘rinib turibdiki, termoparalarda chiqish signali temperaturaga bog‘liqligi chiziqli emas. Bu nochiziqlikni o‘lchash intervallarini kichikrok tanlash bilan kamaytirish mumkin. Grafikdan ko‘rinib turibdiki, THA (K) tipidagi termoparani chiziqli qismi 400 0C dan keyin, TXK (L) termoparasiniki esa, 200 0C gacha yaqqol ko‘rinib turibdi.
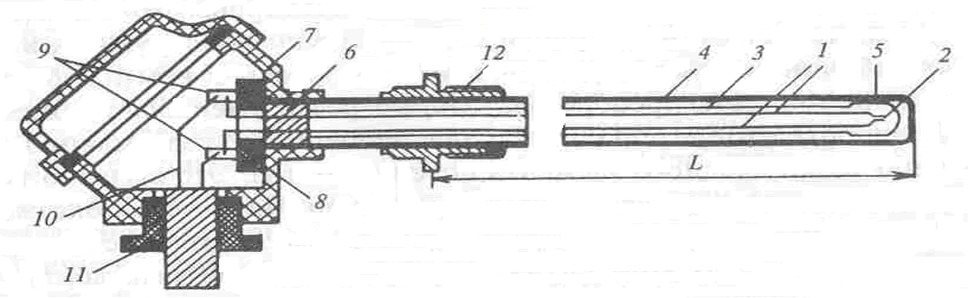
1- elektrodlar, 2- ishchi kavsharlangan uch, 3- trubka, 4- himoya armaturasi, 5- keramik dielektrik, 6- berkituvchi quyma, 7- kallak, 8- klemmnik, 9- qotirgich, 10-uzatuvchi sim, 11- germetik chiqish, 12- termoparani qotirgichi
Termoparalarni kalibrovkalash va qiyoslashda davlat standart meyoriy hujjatlarida keltirilgan gradirovka jadvalidan foydalaniladi. Misol uchun «K» markali termoparani qisqartirilgan intervaldagi gradirovkasi quyidagicha:
6.4.3. Pirometrlar
Pirometr — bu qizdirilgan jismni temperaturasini masofadan, kontaktsiz o‘lchovchi asbob bo‘lib, 0 0C dan 6 000 0C bo‘lgan temperaturani o‘lchay oladi. Pirometrlar ishlash prinsiplariga qarab quyidagicha turlarda bo‘linadi:
— Radiatsion pirometr;
— Optik pirometr;
— Spektral pirometr.
Radiatsion pirometr yig‘uvchi linza orqali qizdirilgan jismdan kelayotgan nurlanishni termobatareyalarga uzatib, ularda hosil bulayatgan yig‘indi t.e.yu. k. ni o‘lchashga asoslangan. Termopara ishga yaroqli bo‘lishi uchun me’yoriy hujjatlarda ko‘rsatilgan gradirovkaga ruxsat etilgan xatolik darajasida mos kelishi kerak.
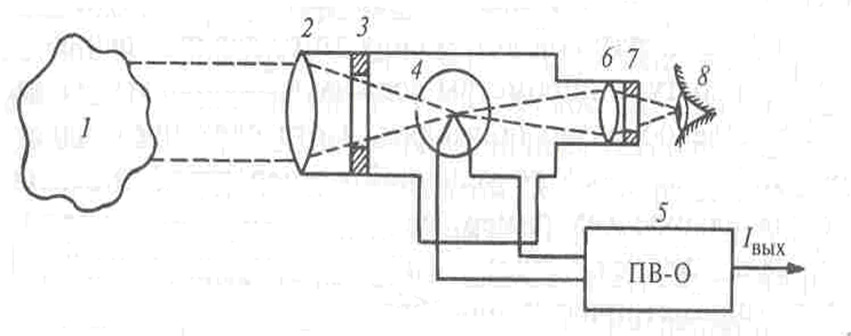
1- temperaturasi o‘lchanadigan ob’ekt, 2- teleskop obyektivi, 3,7- diafragma, 4- termobatareya, 5- ikkilamchi elektron qurilma, 6- okulyar, 8- kuzatuvchi
Radiatsion pirometrlar 600 0C dan 2500 0C gacha temperaturani o‘lchaydi. Ularni asosiy kamchiligi gradirovka shkalasini chiziqli emasligi va qizdirilgan jism kuzatilayotgan teshikni diametri yetarli darajada katta bo‘lishligini talab qilinishidir. Chunki vizirlash koeffisiyenti f =L/d ≤ 20 bo‘lishi kerak. Bunga erishish oson emas. Formuladan ko‘rinib turibdiki, pirometrni obyektga yaqinroq joylashtirish yoki kuzatish teshigini katta qilish lozim. Pirometrni obyektga yaqin qilinsa, u harorat yuqori bo‘lgan muhitga tushib qoladi, agar kuzatish teshigini katta qilinsa, jismni qizdirilishga sarflanayotgan issiqlik tashqariga chiqib ketishi mumkin.
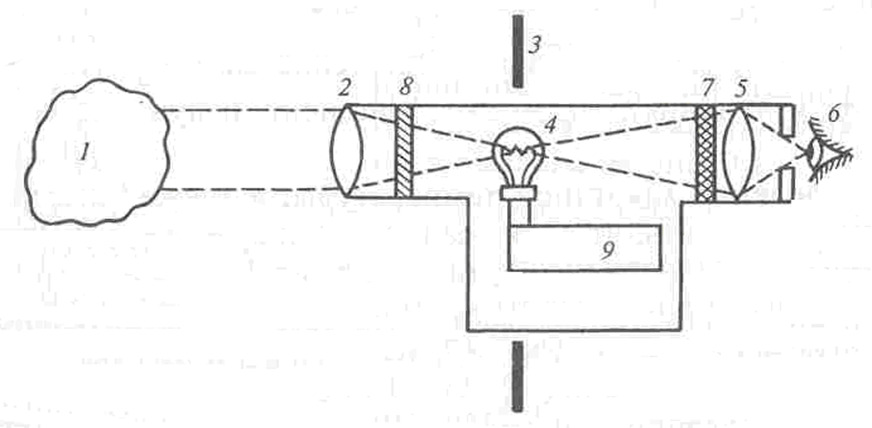
Optik pirometrlar 80—90 yillarda keng qo‘llanilgan. Uning ishlash prinsipi qizdirlgan simni yoritilganligi kuzatilayotgan qizdirilgan jism yoritilganligiga teng bo‘lishi bilan qizdirilgan sim ko‘rinmay qolishi effektiga asoslangan. U yordamida 100 0C dan 6 000 0C gacha bo‘lgan temperaturani o‘lchash mumkin. Pirometrda o‘lchash diapazonini ortirish maqsadida maxsus yorug‘lik filtri o‘rnatilgan bo‘lib, uni temperaturani yuqori pastligiga qarab tanlash imkoniyati bor. Qizdirilgan simni yoritilganligini unga berilayotgan tok kuchini o‘zgartirish bilan erishish mumkin [32]. Potensiomert ruchkasini buralishi temperaturaga gradirovkalangan. Optik pirometrlar foydalanishga qulay lekin, ularni aniqlik darajasi juda past.
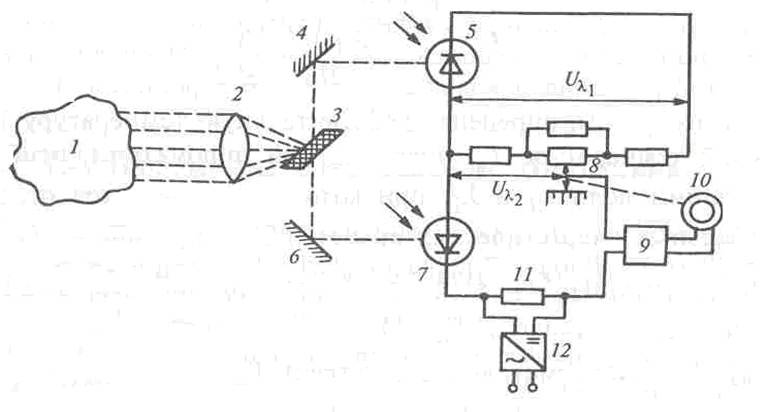
Spektral pirometrlar eng oxirgi yaratilgan pirometrlardan bo‘lib, ularni o‘lchash aniqligi juda yuqori. Ishlash prinsipi qizdiralayotgan jismlarni nurlanish spektri temperaturaga bog‘liq ekanligiga asoslangan. Temperatura ortishi bilan nurlanayotgan jismni spektri kichik to‘lqin uzunligiga tomon suriladi. Hozirgi zamon spektral pirometrlar mikroprotsessorli bo‘lib, ularni xotirasiga qizdirilgan jismlarni temperaturalarini spektrlari yozib qo‘yilgan. Temperaturani o‘lchashda kuzatilayotgan obyektni nurlanish spektri xotiradagi spektrga solishtirilib, mos qiymat aniqlanadi.
Turli tarkibdagi obyektlar bir xil temperaturada qizdirilganda, turlicha nurlanish spektrini berganligi sababli, pirometrni qo‘llanishida maxsus to‘g‘irlovchi koeffitsient kiritiladi. Bu koeffitsientlar har bir pirometrni texnik hujjatlarida ko‘rsatiladi.
Nazorat savollari
1. Haroratni fizik asosi nimada?
2. Haroratni qanday qurilmalar asosida o‘lchaniladi?
3. Termo datchiklarni qanday turlari mavjud?
4. Elektr qarsilik haroratga qanday boglangan?
5. Qarshilikli termodatchiklar ikkilamchi qurilmalarga qanday ulanadi?
6. Termo juftlik sensorlarini ishlashi qanday fizik hodisaga asoslangan?
7. Pirometrlardan qanday hollarda foydalaniladi?
8. Pirometrlarni qanday turlari mavjud?
6.5. Bosim va so‘rilishni (разрежения) o‘lchash
Bosim P — bu sirtga perpendikulyar ta’sir ko‘rsatadigan F kuchning ushbu sirtning S maydoniga nisbati: P = F / S Bosimning SI birligi 1 Paskal (1 Pa = 1 N / 1m2). SI birliklari bilan bir qatorda tizimli bo‘lmagan birliklar ishlatiladi: texnik atmosfera: 1 at = 1 kgf / cm2 = 98066 Pa, simob millimetri: 1 mm Hg. = 133,3 Pa, suv ustuni millimetri: 1 mm suv ustuni = 9,8 Pa.
Texnologi jarayonlarni borishidagi bosim va bosim pasayishlarini manometr, vakuummetr va vacuum manometrlardan foydalanib o‘lchanadi. Ular o‘zlarini ishlash prinsiplariga qarab suyuqlikli, deformatsion, yuk-porshenli va elektrik bo‘lishi mumkin.
Manometr bu absolyut bosim (Pabs) bilan barometrik bosim (Pbar) o‘rtasidagi farq, ortiqcha bosim (Port) ni Pabs ≥ Pbar bo‘lgan holatni o‘lchaydigan qurilma.
Vakuummetr bu absolyut bosim (Pabs) bilan barometrik bosim (Rbar) o‘rtasidagi farq, ortiqcha bosim (Port) ni Pabs ≤ Pbar bo‘lgan holatni o‘lchaydigan qurilma.
Vakuummanometr esa ikkala holatda ham bosimni o‘lchashga mo‘ljallangan qurilmadir.
Bosim fizik kattalik bo‘lib, u bir jismni ikkinchi bir jism sirtini yuza birligiga ta’sir etuvchi kuchdir. Gaz va suyuqliklar ma’lum idishlarda tutib turilganligi va harakatda bo‘lganligi sababli idishning hamma qismiga teng ta’sir ko‘rsatadi. Bosim kattaligi gaz yoki suyuqlikni tashkil etuvchi zarralarni ichki energiyasini xarakterlaydi. Yuqorida ko‘rsatib o‘tilgandek, bosimni SI sistemasidagi o‘lchov birligi Paskal bo‘lib 1Pa = 1N/m2. Pa ga karrali bo‘lgan birliklar bilan bir qatorda kgs/sm2, kgs/m2 birliklar ham ishlatiladi [27].
Absolyut bosim deyilganda gaz yoki suyuqlikni to‘la bosim tushiniladi. Barometrik bosim esa bu atmosfera bosimidir. Suyuqlik va deformatsion bosim o‘lchash vositalari asosan texnik o‘lchash vositalari hisoblanib, ko‘p hollarda statik protsesslarni bosimini o‘lchashda foydalaniladi. Ulardan boshqa manometrlarni kalibrovkalashda namunaviy o‘lchov vositasi sifatida ham qo‘llaniladi. Yuk — porshenli bosim o‘lchash qurilmasi asosan namunaviy o‘lchash vositasi sifatida ishlatilishidan tashqari, bosimni etalloni sifatida ham qo‘llaniladi.
Suyuq manometrlar ishlaydigan suyuqlik bilan to‘ldirilgan (suv, simob, yog», spirt va boshqalar) aloqa qiluvchi idishlardir. Bosim farqi mavjud bo‘lganda trubkalardagi ishchi suyuqlik sathlari muvozanat o‘rnatilguncha harakatlanadi.
Past bosimlarni o‘lchash uchun U shaklidagi eng oddiy suyuq U-manometrlari (rasm 6.18, a) ishlatiladi. Naychaning bir uchiga bosim tushganda suyuqlik harakatlanadi. Bosim sathlar farqi bilan o‘lchanadi va millimetrda ifodalanadi. Agar kolba simob bilan to‘lgan bo‘lsa, bosim simob millimetrida ifodalanadi. Ushbu manometrdan foydalanishning qiyinligi shundaki, shkalaning nolidan boshlab har ikki yo‘nalishda ham o‘qish zarur.
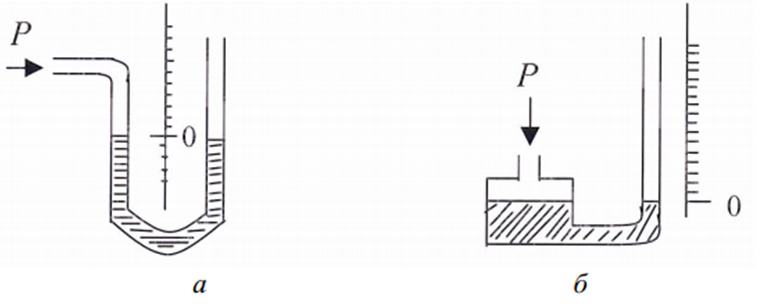
Ushbu kamchilik bir naychali stakan manometrlarida yo‘q (6.18-rasm, b). Chap bosish maydoni bir necha baravar kattaroq bo‘lgani uchun undagi suyuqlik sathining harakati bir xil miqdordagi marta kamroq va uni e’tiborsiz qoldirish mumkin.
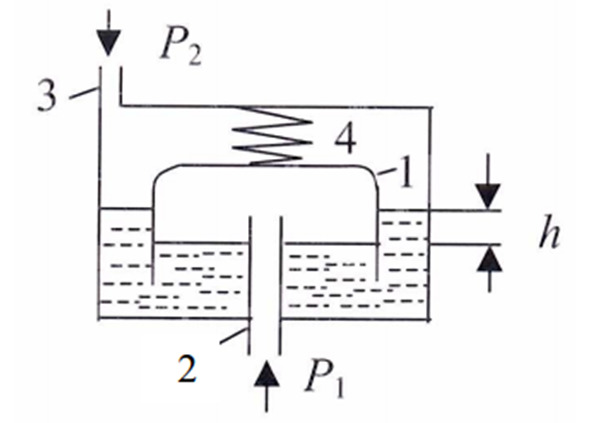
Tebranuvchi (kolokolniy) differensial bosim o‘lchagichining ishlash prinsipi rasm 6.19 da keltirilgan. Transformator moyiga qisman botirilgan yurgich 1 qurilmaning sezgir elementi hisoblanadi. Tebranuvchi ichiga naycha o‘rnatilgan 2, bu orqali bosim P1 ta’minlanadi. Bosim P2 Tebranuvchi ustidagi 3 naycha orqali beriladi. Tebranuvchi 4- prujina bilan mahkamlangan.
P1 — P2 bosim farqi ostida suyuqlik tebranuvchi ostidan chiqarib tashlanadi va u harakat qiladi. Tebranuvchining siljishi ba’zi bir siljish o‘zgartirgichlari tomonidan elektr signaliga aylanishi mumkin.
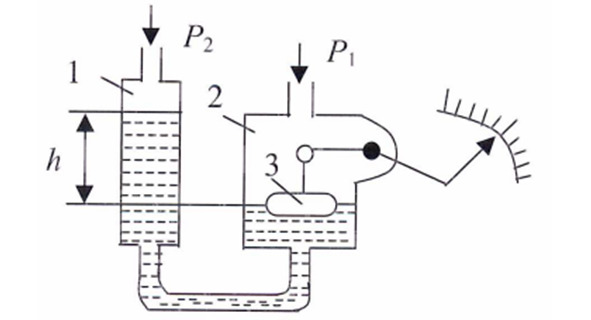
Suzuvchi (poplavokli) differensial bosim o‘lchagichi (6.20-rasm) ishlaydigan suyuqlik bilan to‘ldirilgan ikkita 1 va 2 aloqa trubkalaridan iborat. Keng idish yuzasida 3 suzuvchi (poplavokli) suzadi. P1 va P2 bosimlari trubkalarga beriladi, ularning farqini o‘lchash kerak. Suzuvchi idishdagi suyuqlik sathining o‘zgarishini nazorat qiladi 2. Suzuvchi harakati strelka yoki chizg‘ichga uzatiladi, shuningdek, masalan, differensial transformator sensori yordamida kuchlanishga aylanadi.
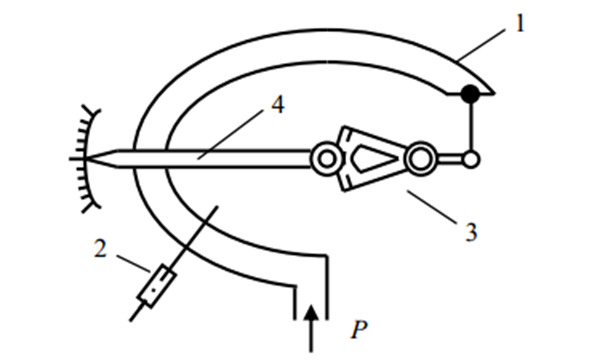
Prujinali manometrlarni ishlash prinsipi prujinani to‘la elastikligiga asoslangan. Bir o‘ramli prijinali manometrlar keng tarqalgan (6.21- rasm). Trubkali prujina to‘gri yoki oval shaklida bo‘lishi mumkin. Trubkani bir uchi payka qilingan va uzatish tizimi 3 orqali strelka 4 bilan bog‘langan. Bosim ortishi bilan prujina to‘g‘rilanishga harakat qiladi va strelkani suradi. Strelka shkalada bosimni ko‘rsatadi. Manometrni sezgirligini ortirish uchun ko‘p o‘ramli prujinalardan foydalaniladi.
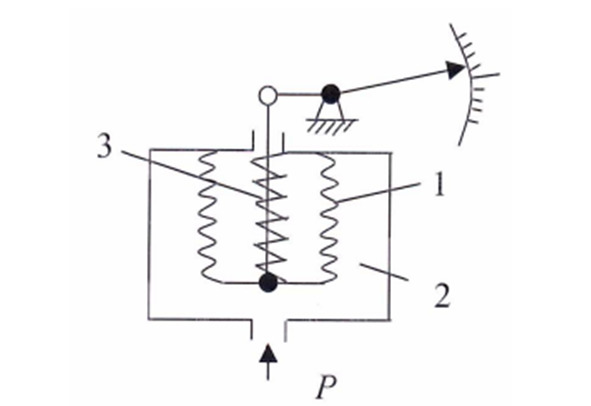
Silfonli bosim o‘lchagichning sezgir elementi silfon — elastik metalldan tayyorlangan gofrirovka qilingan ingichka devorli quti (6.22-rasm). Silfon 1 kameraga 2 joylashtiriladi, unga o‘lchangan bosim P yetkazib beriladi, bosim ta’sirida silfon pastki qismi harakat qiladi, harakat uzatish mexanizmi orqali qurilmaning ko‘rsatkichiga uzatiladi. 3- prujina ta’sirida bosimni bo‘shatgandan so‘ng, silfon asl holatiga qaytadi.
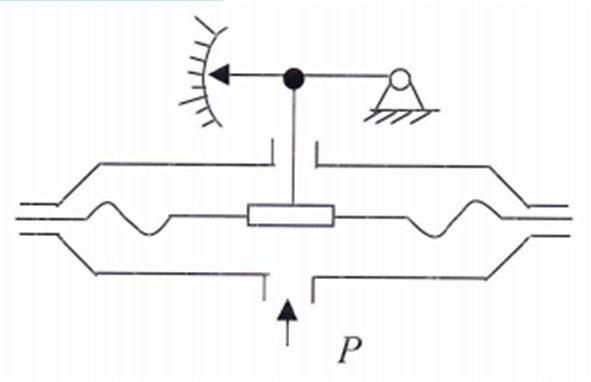
Diafragma bosim o‘lchagichlari po‘lat, rangli metallar va ularning qotishmalariga nisbatan neytral bo‘lgan quruq havo yoki gazlarning past bosimi va so‘rilishni (tyaganaporometr) o‘lchash uchun mo‘ljallangan. Diafragma bosim o‘lchagichida (6.23-rasm) ortiqcha bosim ta’sirida egilib, o‘lchov elementi sifatida qo‘llaniladi. Sezuvchi element sifatida gofrirovka qilingan elastik membranadan foydalaniladi.
Diafragma differensial bosim ko‘rsatkichi DM (6.24-rasm) sezgir element sifatida ikkita membrana bo‘linmalarining 1 va 2 membrana blokiga ega. Bo‘linmalarning ichki bo‘shliqlari distirlangan suv bilan to‘ldirilgan va kanal orqali ulangan. Membrana qutilari alohida kameralarga joylashtirilgan P1 va P2 bosimlari bilan ta’minlangan 3 va 4, P1> P2…
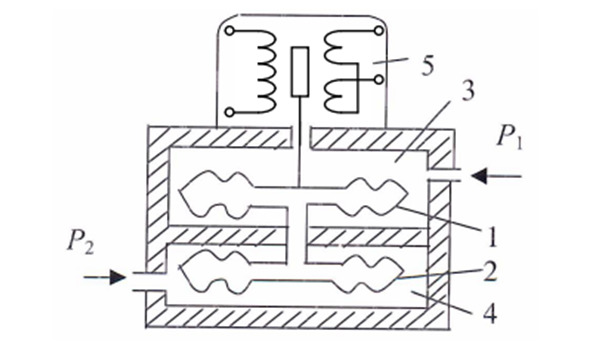
Bosim farqi ta’sirida membrana bo‘linmasidan 2 suv membrana bo‘linma 1 majburlanib, membrana qutisining yuqori devorining harakatlanishiga olib keladi. Shu bilan birga, unga ulangan differensial transformator sensori 5 ning yadrosi harakatga kelib, sensorning chiqish kuchlanishining kattaligi va fazasining o‘zgarishiga olib keladi.
Hozirgii zamon ishlab chiqarish korxonalarida texnologik jarayonlarni uzluksiz nazorat qilishda va texnologik jarayonlarni avtomatik boshqarish tizimlarida asosan elektron (elektrik) bosim datchiklaridan foydalaniladi. Ular quyidagilar:
— Pezoelektrik;
— Tenzorezistorli;
— Sig‘imli;
— Rezonansli;
— Induksion;
— ionizatsion.
Pezoelektrik bosim datchiklari. Kristallarni ma’lum tomoniga bosim berilganida qarama-qarshi tomonlarida zaryad to‘planish hodisasiga asoslangan.
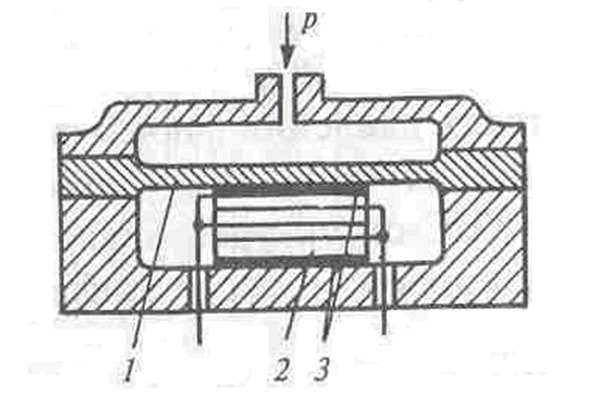
Rasm 6.25. da pezoelektrik bosim datchigi sxematik keltirilgan. R bosim 1 membrana orqali 3- kvarsga ta’sir etib, uni deformatsiyalaydi. Natijada pezoelektrik fizik hodisaga asosan. Z metall qatlamlarda turlicha ishorali zaryadlar hosil bo‘ladi.
Hosil bo‘layotgan zaryadni quyidagicha ifodalash mumkin;
Q = kF = kPS
bu yerda k — pezoelektrik doimiysi, P — ta’sir etuvchi bosim.
Datchik chiqishidagi kuchlanish
u = Q/C
ifodasi bilan aniqlanadi. Bu yerda C — o‘lchash zanjiridagi umumiy sig‘im.
Kvars boshqa pezo xususiyatlarga ega bo‘lgan segnetoelektriklar ichida mexanik jihatdan mustahkam va qattiqlikka ega bo‘lgani uchun membranani qattiq deformatsiyalanishiga yo‘l qo‘ymaydi. Bu esa pezoelektrik effektni uzatilishini kechiktirmaydi. Shuning uchun bunday pezoelektrik datchiklarni yuqori chastotali tebranishlarni aniqlashda ham ishlatish imkoniyatini beradi. Kvarsni pezoelektrik doiymisi 2 10—12 K/N bo‘lib temperaturaga kam bog‘liqligi yuqori temperaturali jarayonlarda bosim datchigi sifatida qo‘llanishiga olib keladi.
Tenzometrik bosim datchiklari ishlab chiqarishda qo‘llanilayotgan bosim datchiklari ichida asosiy o‘rinni egallamoqda. Ularni ishlash prinsipi turli formada tayyorlangan tenzorezistrli elastik membrana egilishi bilan elektr qarshiligini o‘zgarishiga asoslangan. Tenzoqarshiliklar plyonka yoki sim ko‘rinishida tayyorlanishi mumkin. Ularni asosiy xarakteristikasi elektr qarshiligini o‘zgarishini deformatsiya o‘zgarishiga nisbati bilan belgilanadi.
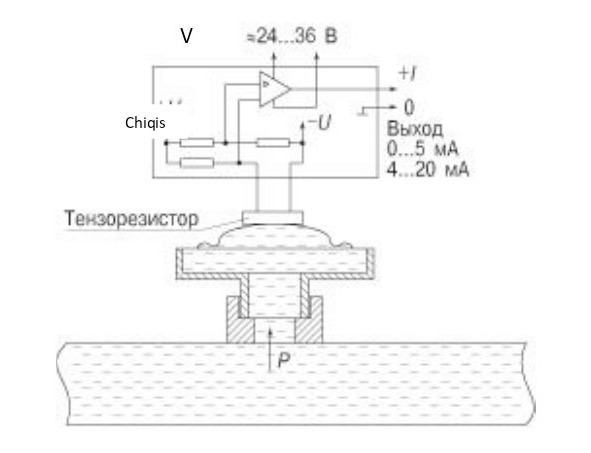
Rossiyani asosiy bosim datchiklarini ishlab chiqaruvchi firmalarida tenzoqarshilik «sapfirga kremniy» strukturasi qo‘llanilmoqda. Bu strukturalar ko‘rinishida, avtomatlashtirish qurilmalarini ishlab chiqarishda dunyoda ikkinchi reytingda turuvchi Siemens firmasida ham ishlab chiqilmoqda.
1-asos, 2-plenka.
Ko‘p adabiyotlarda tenzoqarshilikli bosim datchiklarini asosiy elenmentini tashqil etuvchi «tenzoqarshilik»ni «tenzoaylantiruvchi» deb ham atalmoqda.
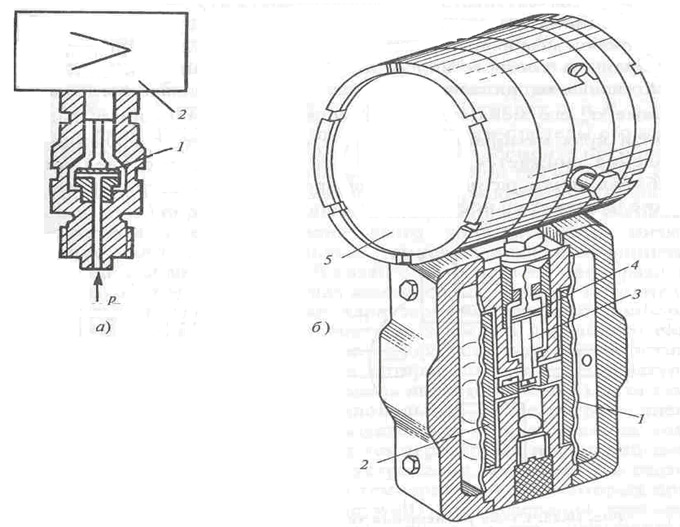
Tenzoqarshilikli bosim datchiklarida datchikga ta’sir etuvchi qismi ikki xil bo‘lishi mumkin. Bevosita bosim ta’sir etishi mumkin (6.28a-rasm) yoki natijaviy kuch richag orqali uzatilishi mumkin (6.28b-rasm). Bosim bevosita ta’sir etuvchi tenzoqarshilikli bosim datchiklarida o‘lchash intervali aniq belgilanadi. Bu oraliqni boshqa oraliqni o‘lchash uchun qayta sozlab bo‘lmaydi. Ikkinchi tur, ta’sir richag orqali kuch ta’sirida uzatiladigan tenzoqarshilikli bosim datchiklarida o‘lchash oraliqlarini ma’lum oraliqlarga qayta sozlash mumkin. Qayta sozlash datchikni elektron blokida joylashgan kalitlar orqali yoki agar tenzoqarshilikli bosim datchigi mikroprotsessorli bo‘lsa, maxsus programmator orqali amalga oshiriladi. Misol uchun «Sapfir-22M-DI» tenzoqarshilikli ortiqcha bosimni o‘lchash datchigini «2050» modelini quyidagi intervallardagi ortiqcha bosimni o‘lchashga sozlash mumkin:
0 dan 0,4 mPa.gacha;
0 dan 0,6 mPa.gacha;
0 dan 1,0 mPa.gacha;
0 dan 1,6 mPa.gacha;
0 dan 2,5 mPa.gacha.
O«lchash oraliqlarini tanlashda texnologik jarayondagi o‘lchanayotgan joydagi maksimal bosimga qaraladi. Agar maksimal bosim kichikroq bo‘lsada, tenzoqarshilikli bosim datchigini kattaroq oraliqqa sozlansa, o‘lchash aniqligi kamayadi. Chunki o‘lchashdagi birlik o‘lcham (sena deleniya) kattalashib ketadi. Shuning uchun tanlanayotgan tenzoqarshilikli bosim datchigini o‘lchash intervali texnologik jarayon bosimini o‘zgarish intervaliga mos bo‘lishi kerak.
Texnologik jarayonlarni avtomatik boshqarish tizimlarida keng qo‘llanilayotgan Rossiya kompaniyalarida ishlab chiqarilayotgan «Sapfir-22M» bosim o‘zgartirish datchigiga kengroq to‘xtalib o‘tamiz. Bu bosim datchigi normal va agressiv muhitlarni quyida keltirilgan bosim turlarini o‘lchab, masofaga keltirilgan elektr signali ko‘rinishida uzatuvchi qurilmadir:
«Sapfir-22M- DA» absolyut bosimni o‘lchash datchigi;
«Sapfir-22M- DI» ortiqcha bosimni o‘lchash datchigi;
«Sapfir-22M- DV» bosim kamayishi (разряжения) ni o‘lchash datchigi;
«Sapfir-22M- DIV» ortiqcha — kamaygan bosimni o‘lchash datchigi;
«Sapfir-22M- DD» bosim farqini o‘lchash datchigi.
«Sapfir-22M» bosim datchigi qo‘llanilayotgan o‘lchash tizimidagi ikklamchi o‘lchov vositasi keltirilgan elektr signallari 0 ÷ 5 mA, 4 ÷ 20 mA, 0 ÷ 20 mA, doimiy toklarni kiruvchi signal sifatida qabul qila olishi kerak. Bosim datchigi o‘zini markasiga qarab, 36 V yoki 24 V.li stabillashtirilgan doimiy tok manbai bilan birga ishlatiladi.
Tenzoqarshilikli bosimni o‘zgartiruvchi qurilmalarida asosiy qismlardan biri elektron blokidir. Uning vazifasi deformatsiya ostida sezuvchi elementni qarshiligini o‘zgarishini kalibrovkada keltirilgan bosimga mos chiqish elektr signalini tashkil etishdir.
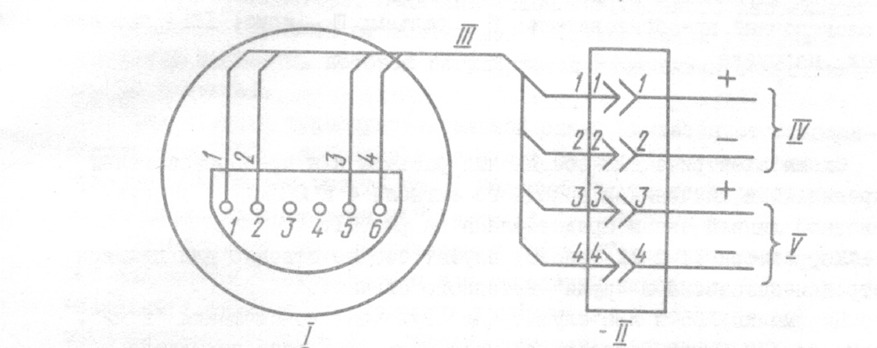
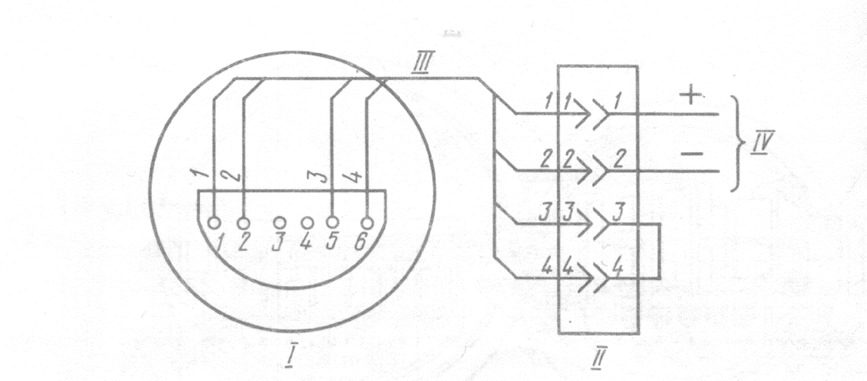
4-simli ulanishda bosim datchigiga tok manbai klemmnikni 1,2 nuqtalarga ulanib, chiqish signali klemmnikni 3,4 nuqtalardan tok kuchi ko‘rinishida olinadi. 2- simli ulanishda klemmnikni 3,4 chi nuqtalar o‘zaro tutashtirilib, tok manbai va yuklama, ya’ni ikkilamchi o‘lchash vositasi klemmnikni 1,2 nuqtalarga ulanadi. Bu turdagi bosim datchiklari o‘zlarini standart doimiy tok manbalari 22BP-36 bilan birga qo‘llaniladi. 22BP-36 doimiy tok manbai stabillashgan 36 V kuchlanishga ega bo‘lib, 1,2,4,6 kanalli bo‘ladi. 6- kanalli tok manbaiga bir vaqtni o‘zida 6 tagacha bosim datchigi ulanishi mumkin.
6.31 — rasmda II lar bosim datchiklari, Rn ikkilamchi o‘lchash vositalari.
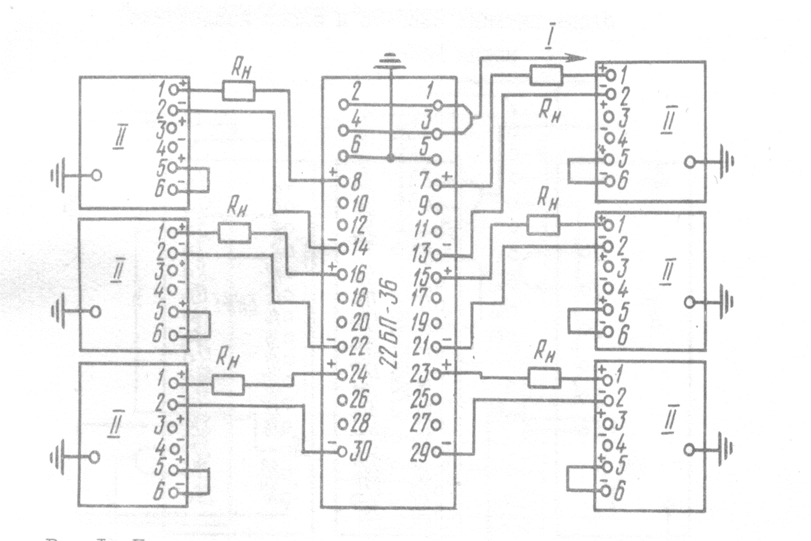
Dunyo bo‘yicha avtomatlashtirilgan tizimlarda qo‘llaniladigan qurilmalarni ishlab chiqaruvchi kompaniyalar juda ko‘p. Lekin ulardan Honuveyel, Simens, Advantech, va boshqa kompaniyalar qurilmalari o‘zlarini ishonchliligi, xatoligi kamligi, kalibrovkalash qulayligi va universalligi bilan ajralib turadi. Lekin ulardan tashqari Rossiya kompaniyalari ishlab chiqarayotgan tenzorezistorli bosim datchiklari Sapfir va Metran ham texnologik jarayonlarni nazorat qilishda keng qo‘llanilmoqda.
Metran bosim datchiklaridan hozirda ishlab chiqarilayotgani asosan mikroprotsessorli bo‘lib, o‘lchanayotgan bosim intervaliga programmator orqali programmalashtiriladi. Ba’zi Metran bosim datchiklarini chiqish signallari raqamli bo‘lib, bevosita kompyuterlarga vizualizatsiya va arxivlash uchun uzatilishi mumkin. Masalan quyidagi keltirilgan datchiklarni intellektual datchiklar deb atalib, programmalashtirilishiga qarab keltirilgan (unifitsirovanniy) yoki HART protokoli bo‘yicha raqamli elektr signali chiqaradi. O‘lchashdagi asosiy nisbiy xatolik 0,1% ni tashkil etadi.
— ortiqcha bosim o‘lchash datchigi — Metran-100-DI;
— absolyut bosim o‘lchash datchigi — Metran-100-DA;
— bosim pasayishi (разрежения) o‘lchash datchigi — Metran-100-DV;
— bosim — bosim pasayishi o‘lchash datchigi — Metran-100-DIV;
— bosim farqi (perepad) o‘lchash datchigi — Metran-100-DD;
— gidrostatik bosim o‘lchash datchigi — Metran-100-DG.


Dunyoda keng tarqalgan bosim — pasaygan bosim va bosim farqi o‘lchash datchikalarini texnik kattaliklar va narxlarini quyidagi jadvallardan taqqoslash mumkin:
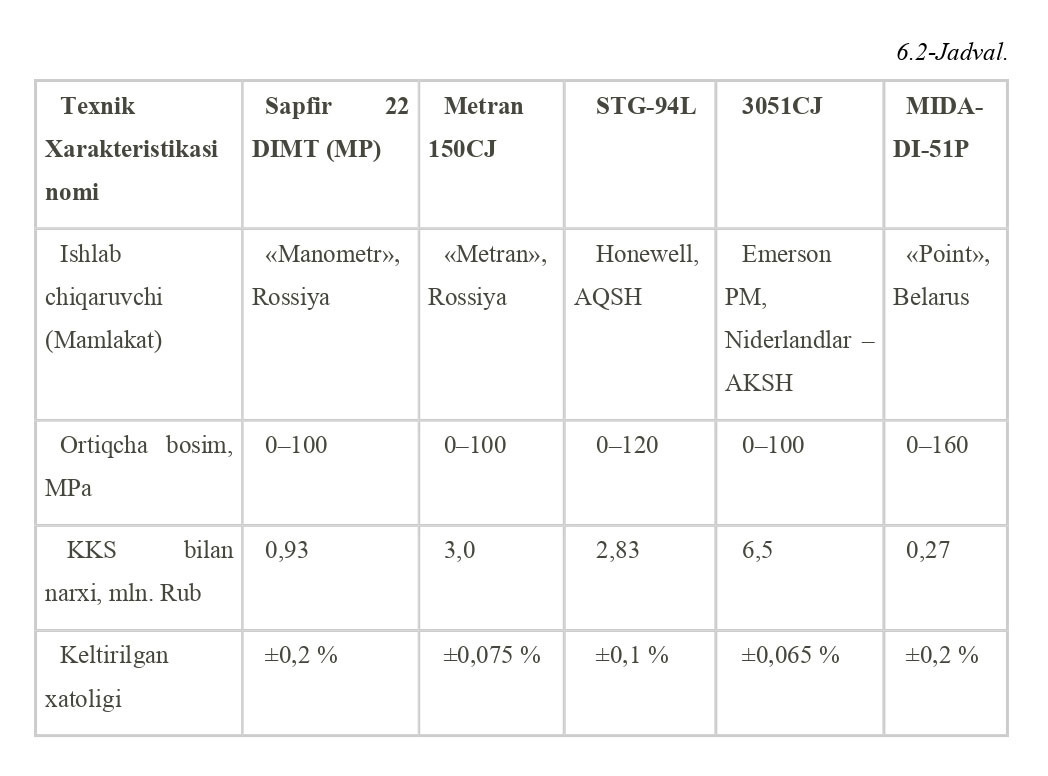
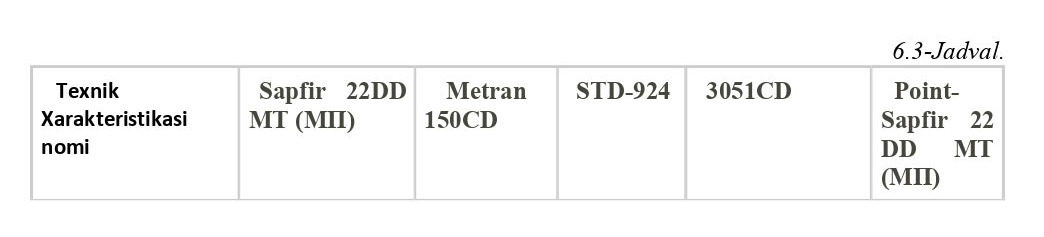
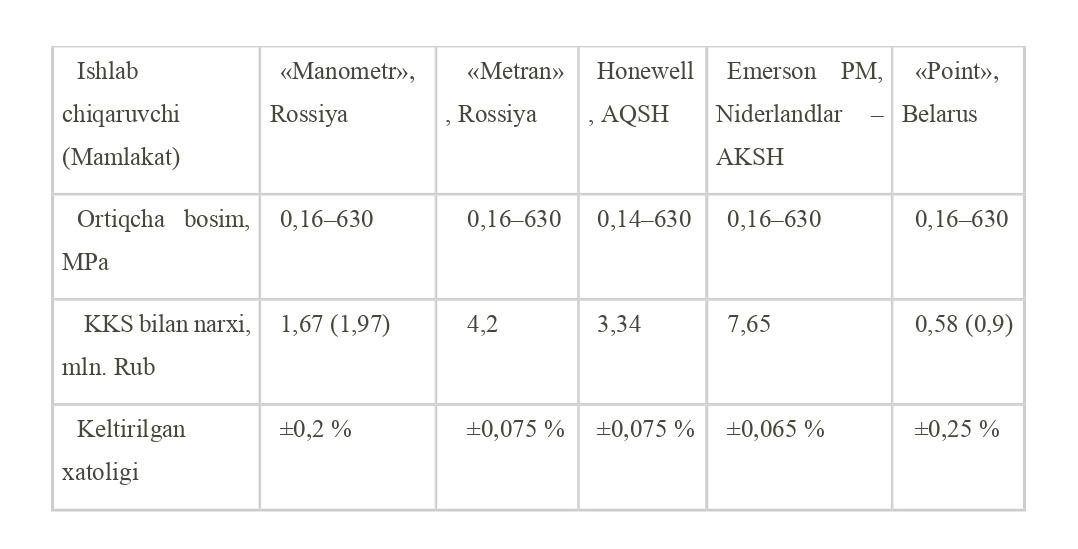
Texnologik jarayonlarni boshqarishni avtomatlashtirilgan tizimlarida foydalanishga qulay va arzon mikroprotsessorli tenzoqarshilikli kichik o‘lchamli bosimni o‘lchash datchiklari ham qo‘llanila boshlandi.

Ularni asosiy qulayliklari quyidagilar:
— kichik o‘lchamli bo‘lganligi sababli o‘rnatishga ko‘p mehnat talab qilinmaydi;
— korpusini himoyalanishi IR65;
— programmalashtirish va kalibrovkalash shart emas;
— ulanish sxemasi sodda;
— talab qilingan tok manbai stabillashtirilmagan va 15 V — 36 V.gacha bo‘lishi mumkin;
— elektr energiyasini kam iste’mol qiladi;
— tashqi elektromagnit maydoniga turg‘un va chiqish signali stabillashtirilgan;
— aniqlilik klassi 0,5 yoki 1.
Kichik o‘lchamli bosim datchiklari ham ikki qisimdan iborat. 1-blok o‘lchash bloki 2- blok elektron blokidir.
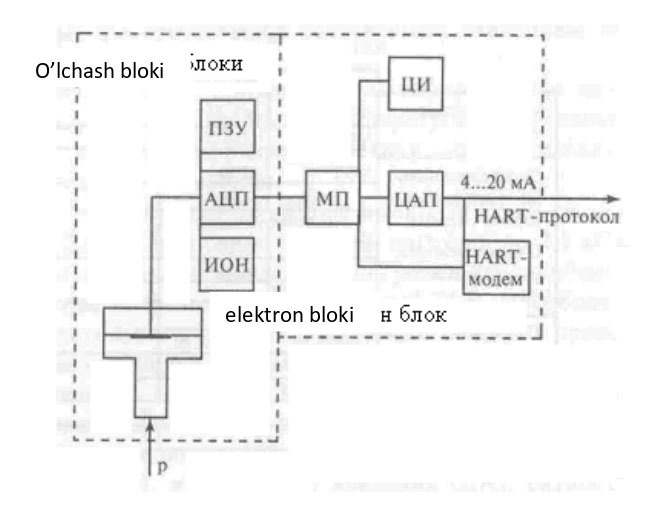
Datchik tokni ION tok manbaidan oladi (rasm 6.35). MP — mikroprotsessor ASP yordamida olingan qarshilik o‘zgarishini raqamli informatsiyaga aylantirib, PZU doimiy xotiraga yozib qo‘yilgan kattaliklar bo‘yicha real o‘lchov birligiga keltiradi. Bundan tashqari olingan natijani keltirilgan 4 ÷ 20 mA elektr signaliga yoki HART protokol yordamida informatsiyani ikkilamchi qurilmaga uzatishni tashkil etadi.
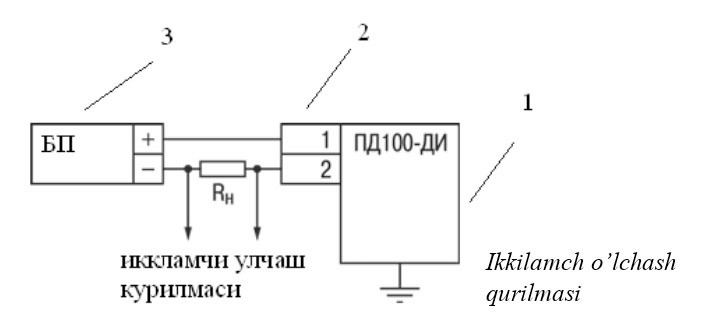
1-bosim datchigi, 2-bosim datchigi ulanish kontaktlari, 3- doimiy tok manbai (12V÷36 V).
Kondensatorli datchik. Kondensator qatlamlari orasidagi masofani o‘zgarishi bilan elektrostatik sig‘imni o‘zgarishiga asoslangan. Ya’ni sig‘imni o‘zgarishi ta’sir etuvchi bosimni o‘zgarishini aks ettiradi. Qurilmadagi elektron blok bu o‘zgarishni elektir signaliga aylantiradi. Sig‘imli bosim datchiklar kremniyli yoki keramik bo‘lishi mumkin. Kondensator koplamlari orasiga odatda yog» yoki biror organik suyuqlik qo‘yiladi. Bu turdagi bosim o‘lchash datchiklar sezgir datchiklar hisoblanadi. Datchikni asosiy kamchiligi chiqish signalini chiziqli emasligidir.
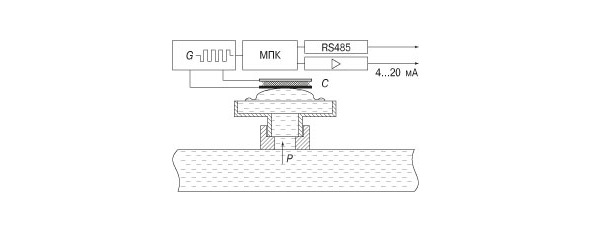
Sig‘imli bosim farqini o‘lchash datchiklari o‘lchash datchigi texnologik jarayonlarni boshqarish tizimlarida aniqligi yuqori bo‘lganligi sababli suyuqlik va gazlarning sarfini uzuluksiz o‘lchashda keng qo‘llanilmoqda.
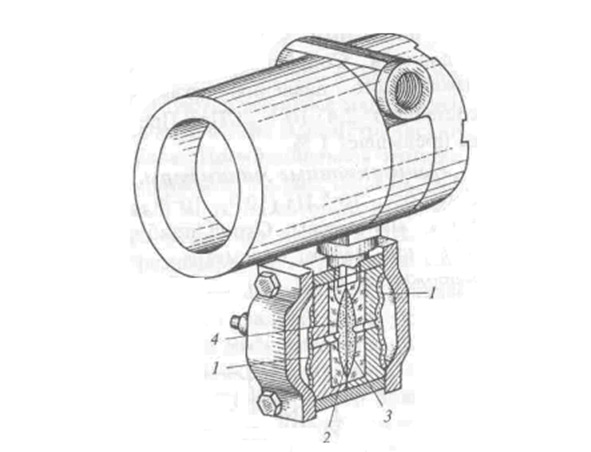
Keltirilgan (rasm 6.38) intellektual mikroprotsesorli bosim farqini o‘lchash Fisher-Rozmont datchigi kameralarda qo‘yilgan 1 membranalar kondensator qo‘zg‘almas qoplamalari 3,4 orasiga qo‘yilgan 2 sezuvchi membrana bilan boglangan. Kondensator qoplamalari orasi neytral suyuqlik bilan to‘ldirilgan. Bosim farqi ta’siri ostida 2 sezuvchi element — membrana o‘zgaradi. Bu esa sistemani elektr sig‘imini o‘zgarishiga olib keladi. Bu o‘zgarishni elektron blokida joylashgan mikroprotsessor ASP yordamida raqamli signalga aylantirib qayta ishlaydi. Natijaviy signalni keltirilgan elektr signali ko‘rinishida uzuluksiz uzatadi.
Rezonans bosim o‘lchash datchigini ishlash prinsipi akustik yoki elektromagnit to‘lqinlarni suyuqlik va gazlarda uzatilish hodisasiga asoslangan. Ular juda stabil datchiklar hisoblanadi. Lekin kamchiliklar shundaki, har bir datchik o‘lchanayotgan sharoitga individul tayyorlanadi va agressiv muhitlarda xatolik chegarasidan chiqmasdan foydalanish imkoniyati yo‘q.
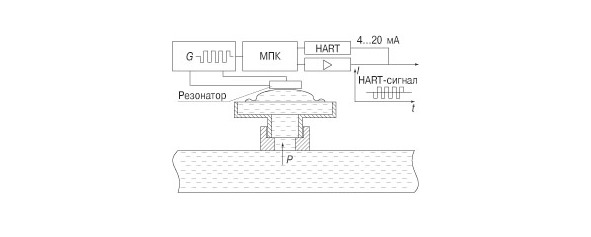
Induksion bosim o‘lchash datchiklarini ishlash prinsipi aylanma (Fuko) toklarini qayd qilishga asoslangan. Datchikni sezuvchi elementi ikkita induktiv g‘altak orasiga metall plastinka qo‘yish bilan tashkil etilgan. Birlamchi induktiv g‘altakda o‘zgaruvchan tok o‘tkazilsa, ikkinchi g‘altakda induksion tok hosil bo‘ladi. G‘altaklar orasidagi metall ekranni surilishi sistemani induktivligini o‘zgartiradi. Sistemani induktivligini o‘zgarishi metall plastinkaga qo‘yilayotgan bosim kuchiga proporsional.
Ionizatsion datchiklar atmosfera bosimidan juda kichik bo‘lgan bosimlar (10—1 — 10 -8 Pa) uchun qo‘llaniladi. Bu datchiklarni ishlash prinsipi elektron lampalarni ishlash prinsipiga o‘xshagan. Agar lampada bosim hosil qiluvchi zarralar soni ko‘p bo‘lsa, katod bilan anod o‘rtasidagi zaryadli zarrachalar harakatiga to‘sqinlik paydo bo‘ladi. Bosim kichrayishi bilan bu to‘sqinlik kamayib boradi.
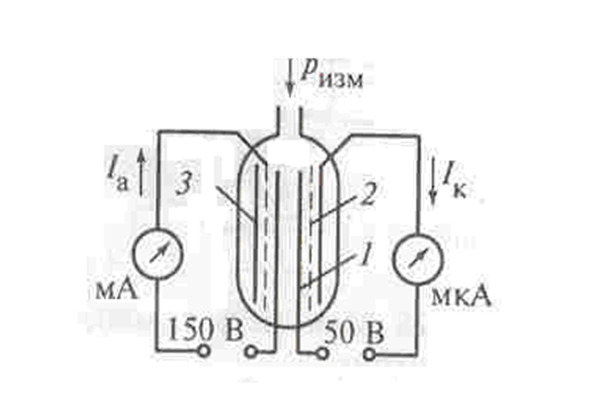
Ionizatsion va sig‘imli dachiklarda chiqish signali bosimga logarifimik shkala bo‘yicha bog‘liq. Ya’ni bog‘lanish chiziqli emas. Bu holat o‘lchash tizimida noqulayliklar tug‘diradi.
Issiqlik manometrlari 10 — 104 Pa bosimlarni o‘lchash uchun qo‘llaniladi.
Бесплатный фрагмент закончился.
Купите книгу, чтобы продолжить чтение.